
PMSM(permanent magnet synchronous motor)實際工作是一種交流電機(jī),其定子運行是三項的相差 的交流電,而轉(zhuǎn)子則是永磁體。但是這種電機(jī)最大的優(yōu)勢就是交流電能量由直流提供,這樣就可以對電機(jī)進(jìn)行精確的控制,而且解決了電刷帶來的壽命問題。
下面對其工作原理進(jìn)行簡單的介紹,如圖 1,定子的工作電流都為正弦波,而且其三項在任何時候相加都為零,所以PMSM中三項繞組實際上沒有中線的,其在電機(jī)中示例繞線方法如圖 2,所以實際上在PMSM中XYZ是連接在一個點的。
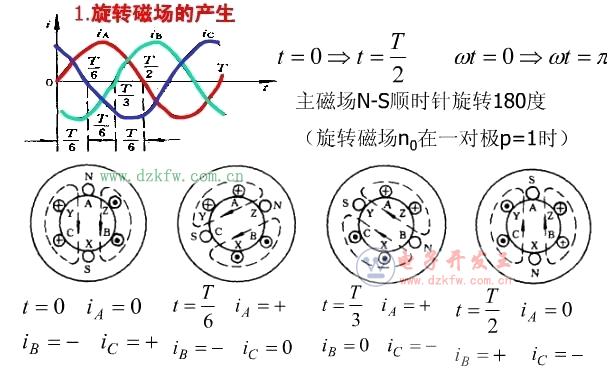
圖 1 PMSM轉(zhuǎn)子電流
從繞線的圖 2中不難看出,實際的電流方向產(chǎn)生的磁場是和轉(zhuǎn)子磁場在同一個平面,這也就是PMSM控制的基本需要和基本方法。從圖中也不難看出,實際在A相產(chǎn)生的磁場在開始是需要與轉(zhuǎn)子磁極的D軸方向相反(可以相差一個確定的角度,軟件實現(xiàn)),確切的說應(yīng)該是必須知道轉(zhuǎn)子的D軸的位置。這個問題實際在控制中是開始的定向問題,在這里簡單的介紹一下方法:如果位置傳感器是絕對碼盤或者旋變,則可根據(jù)絕對位置處理,如果是增量碼盤,則需要開始的一個UVW的大概位置估算。
除此之外,這里還需要明白幾個原理性的問題,這里啰嗦一下:很多人從事這一塊的研發(fā)在知道怎么處理整個系統(tǒng)的過程而實際上是對整個基礎(chǔ)原理模糊的,這也就是很多國人做研發(fā)的通病,只知道怎么做,從來不知道為什么這么做以致永遠(yuǎn)只是模仿而不可能創(chuàng)新或者改進(jìn)。言歸正傳,首先我們知道在控制過程中需要檢測電流,然后進(jìn)行clarke和park變換,從而出現(xiàn)了電流方向問題,人家這么說是為了方便,而實際上上這里的電流方向不是電流方向,而是電流產(chǎn)生的電磁場方向(這是因為電磁場的大小與產(chǎn)生它的電流方向成正比的)。然后研究一下電壓的概念,繞組電壓是比電流相位超前 的,而很多我們需要的結(jié)果是與電壓成一定簡單關(guān)系的,這是因為電壓是場量,而電流不是。根本上沒有電壓這個東西,它只是間接反應(yīng)電流的一種我們定義出來的表達(dá)方式,所以它的變化影響電流,而電流的變化會在場的方面反應(yīng)在電壓上。比如前面討論的問題,在電機(jī)初始的時候,A相電流是零,這是因為在繞組上電流不能突變,而這個時候電壓是最大,反應(yīng)了實際我們是需要加在繞組上最大的我們需要的一個量(電流)。這里描述的有些晦澀,但是物理這個自然界基本規(guī)律實際就是這么反應(yīng)的,希望讀我文章的讀者能自己仔細(xì)揣摩,反應(yīng)一個自然界的問題(都上升到哲學(xué)問題了)。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底