

目錄
1. Arduino簡(jiǎn)史
Arduino是一家制作開(kāi)源計(jì)算機(jī)硬件和軟件的公司,同時(shí)兼有項(xiàng)目和用戶(hù)社區(qū),他負(fù)責(zé)設(shè)計(jì)和制造單板微控制器和微控制器包,用于構(gòu)建數(shù)字設(shè)備和交互式對(duì)象,以便在物理和數(shù)字世界中感知和控制對(duì)象。該項(xiàng)目的產(chǎn)品是按照GNU寬通用公共許可證(LGPL)或GNU通用公共許可證(GPL)許可的開(kāi)源硬件和軟件分發(fā)的,Arduino允許任何人制造Arduino板和軟件分發(fā)。 Arduino板可以以預(yù)裝的形式商業(yè)銷(xiāo)售,也可以作為自己動(dòng)手(DIY)包購(gòu)買(mǎi)。
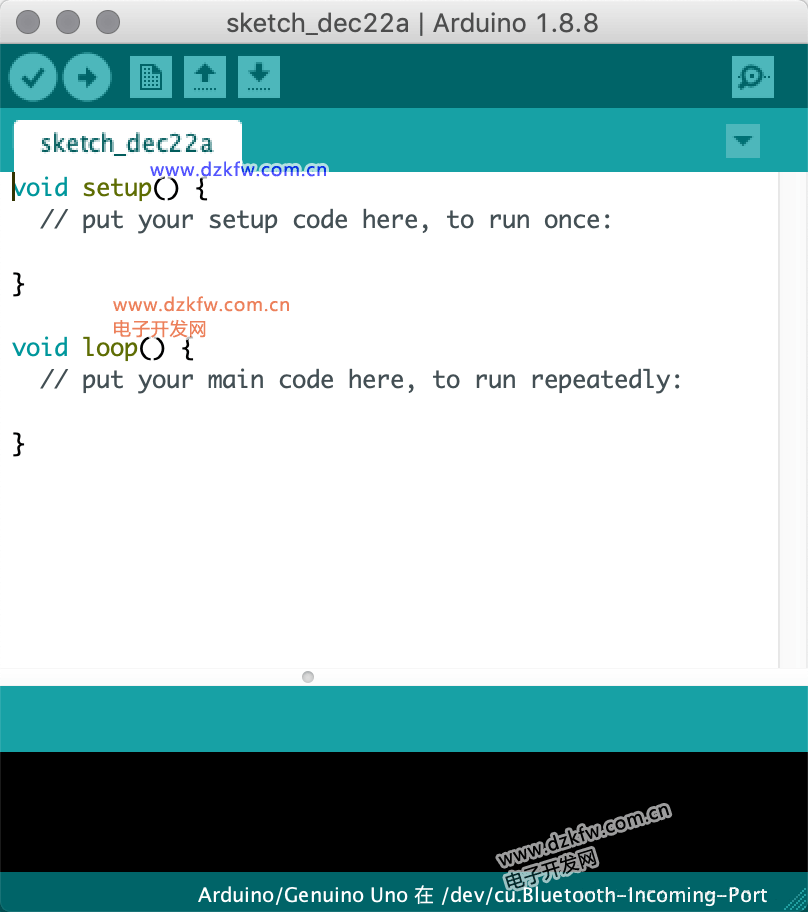
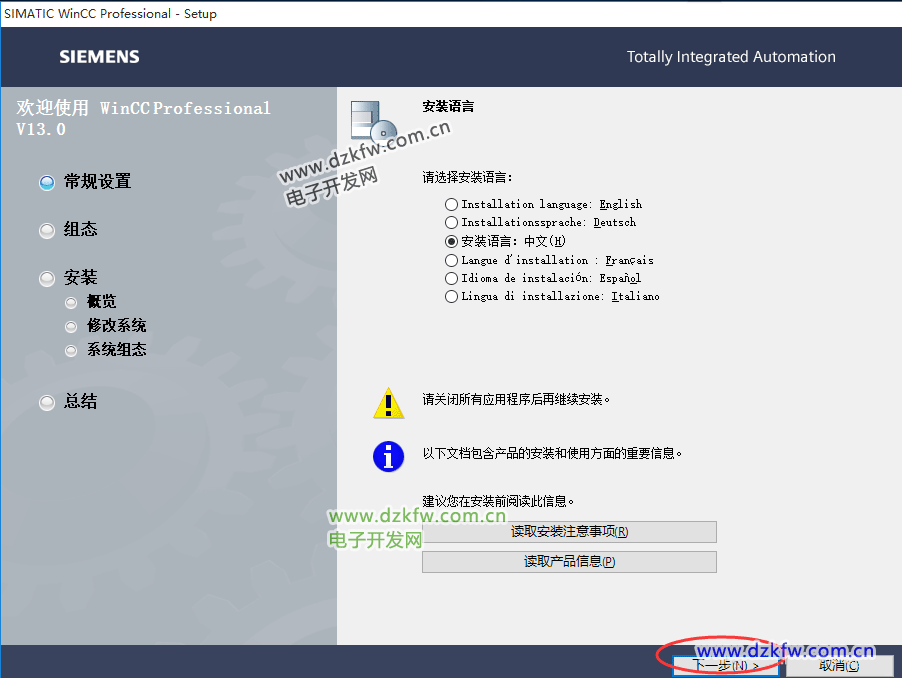
Arduino電路板設(shè)計(jì)使用各種微處理器和控制器。這些電路板配有一組數(shù)字和模擬輸入/輸出(I/O)引腳,可以連接各種擴(kuò)展板或面包板(屏蔽板)和其他電路。這些電路板具有串行通信接口,包括某些型號(hào)上的通用串行總線(xiàn)(USB),也用于從個(gè)人計(jì)算機(jī)加載程序。微控制器通常使用C/C++編程語(yǔ)言。除了使用傳統(tǒng)的編譯工具鏈之外,Arduino項(xiàng)目還提供了一個(gè)基于Processing語(yǔ)言項(xiàng)目的集成開(kāi)發(fā)環(huán)境(IDE),集成開(kāi)發(fā)環(huán)境界面如圖 1.1。
Arduino項(xiàng)目始于2003年,作為意大利伊夫雷亞地區(qū)交互設(shè)計(jì)研究所Ivrea的學(xué)生項(xiàng)目,目的是為新手和專(zhuān)業(yè)人員提供一種低成本且簡(jiǎn)單的方法,以創(chuàng)建使用傳感器與環(huán)境相互作用的設(shè)備執(zhí)行器。適用于初學(xué)者愛(ài)好者的此類(lèi)設(shè)備的常見(jiàn)示例包括簡(jiǎn)單機(jī)器人,恒溫器和運(yùn)動(dòng)檢測(cè)器。
Arduino這個(gè)名字來(lái)自意大利伊夫雷亞的一家酒吧,該項(xiàng)目的一些創(chuàng)始人過(guò)去常常會(huì)去這家酒吧。 酒吧以伊夫雷亞的Arduin命名,他是1002年至1014年期間伊夫雷亞三國(guó)和意大利國(guó)王的統(tǒng)治者。
它使用 Atmel AVR 單片機(jī),采用開(kāi)放源代碼的軟硬件平臺(tái),構(gòu)建于開(kāi)放源代碼 simple I/O 接口板,并具有使用類(lèi)似 Java,C 語(yǔ)言的 Processing/Wiring 開(kāi)發(fā)環(huán)境。
2. Arduino特點(diǎn)
- 基于知識(shí)共享開(kāi)放源代碼的電路圖設(shè)計(jì)。
- 免費(fèi)下載,也可依需求自己修改,但需遵照姓名標(biāo)示。您必須按照作者或授權(quán)人所指定的方式,表彰其姓名。
- 依相同方式分享,若您改變或轉(zhuǎn)變著作,當(dāng)散布該派生著作時(shí),您需采用與本著作相同或類(lèi)似的授權(quán)條款。
- Arduino可使用ICSP在線(xiàn)燒入器,將Bootloader燒入新的IC芯片。
- 可依據(jù)Arduino官方網(wǎng)站,獲取硬件的設(shè)計(jì)檔,加以調(diào)整電路板及組件,以匹配自己實(shí)際設(shè)計(jì)的需求。
- 可簡(jiǎn)單地與感測(cè)器,各式各樣的電子組件連接,如紅外線(xiàn)、超音波、熱敏電阻、光敏電阻、伺服馬達(dá)…等。
- 支持多樣的交互程序,如Adobe Flash, Max/MSP, VVVV, Pure Data, C, Processing…等。
- 使用低價(jià)格的微處理控制器(Atmel AVR)(ATMEGA 8,168,328等)。
- USB接口,不需外接電源。另外有提供直流(DC)電源輸入。
2.1 Arduino參數(shù):
- Digital I/O 數(shù)字輸入/輸出端口0—13。
- Analog I/O 模擬輸入/輸出端口0-5。
- 支持ICSP下載,支持TX/RX。
- 輸入電壓:USB接口供電或者5V-12V外部電源供電。
- 輸出電壓:支持3.3V級(jí)5V DC輸出。
- 處理器:使用Atmel Atmega168 328處理器,因其支持者眾多,
- 已有公司開(kāi)發(fā)出來(lái)32位的MCU平臺(tái)支持arduino。
VIN端口:VIN是input voltage的縮寫(xiě),表示有外部電源時(shí)的輸入端口。
AREF:Reference voltage for the analog inputs(模擬輸入的基準(zhǔn)電壓)。使用analogReference()命令調(diào)用。
ICSP:也有稱(chēng)為ISP(In System Programmer),就是一種線(xiàn)上即時(shí)燒錄,目前比較新的芯片都支持這種燒錄模式。
我們都知道傳統(tǒng)的燒錄方式,都是將被燒錄的芯片,從線(xiàn)路板上拔起,有的焊死在線(xiàn)路板上的芯片,還得先把芯片焊接下來(lái)才能燒錄。只需要準(zhǔn)備一條R232線(xiàn)(連接燒錄器),以及一條連接燒錄器與燒錄芯片針腳的連接線(xiàn)就可以。電源的+5V,GND,兩條負(fù)責(zé)傳輸燒錄信息的針腳,再加上一個(gè)燒錄電壓針腳,這樣就可以燒錄了。
2.2 Arduino 板的說(shuō)明
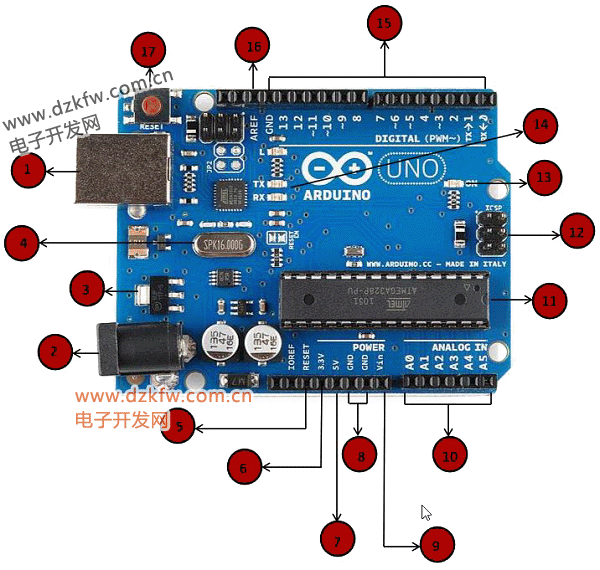
在本章中,我們將了解Arduino板上的不同組件。將學(xué)習(xí)Arduino UNO板,因?yàn)樗茿rduino板系列中最受歡迎的。此外,它是開(kāi)始使用電子和編碼的最佳板。有些板看起來(lái)與下面給出的有些不同,但多數(shù)Arduino中的這些組件大部分是共同的。
| 上圖編號(hào) | 引腳定義 |
| 1 |
電源USB Arduino板可以通過(guò)使用計(jì)算機(jī)上的USB線(xiàn)供電。你需要做的是將USB線(xiàn)連接到USB接口。 |
| 2 |
電源(桶插座) Arduino板可以通過(guò)將其連接到電影插口直接從交流電源供電。 |
| 3 |
穩(wěn)壓器 穩(wěn)壓器的功能是控制提供給Arduino板的電壓,并穩(wěn)定處理器和其他元件使用的直流電壓。 |
| 4 |
晶體振蕩器 晶振幫助Arduino處理時(shí)間問(wèn)題。Arduino如何計(jì)算時(shí)間?答案是,通過(guò)使用晶體振蕩器。在Arduino晶體頂部打印的數(shù)字是16.000H9H。它告訴我們,頻率是16,000,000赫茲或16MHz。 |
| 5,17 |
Arduino重置 你可以重置你的Arduino板,例如從一開(kāi)始就啟動(dòng)你的程序。可以通過(guò)兩種方式重置UNO板。首先,通過(guò)使用板上的復(fù)位按鈕(17)。其次,你可以將外部復(fù)位按鈕連接到標(biāo)有RESET(5)的Arduino引腳。 |
| 6,7,8,9 |
引腳(3.3,5,GND,Vin)
|
| 10 |
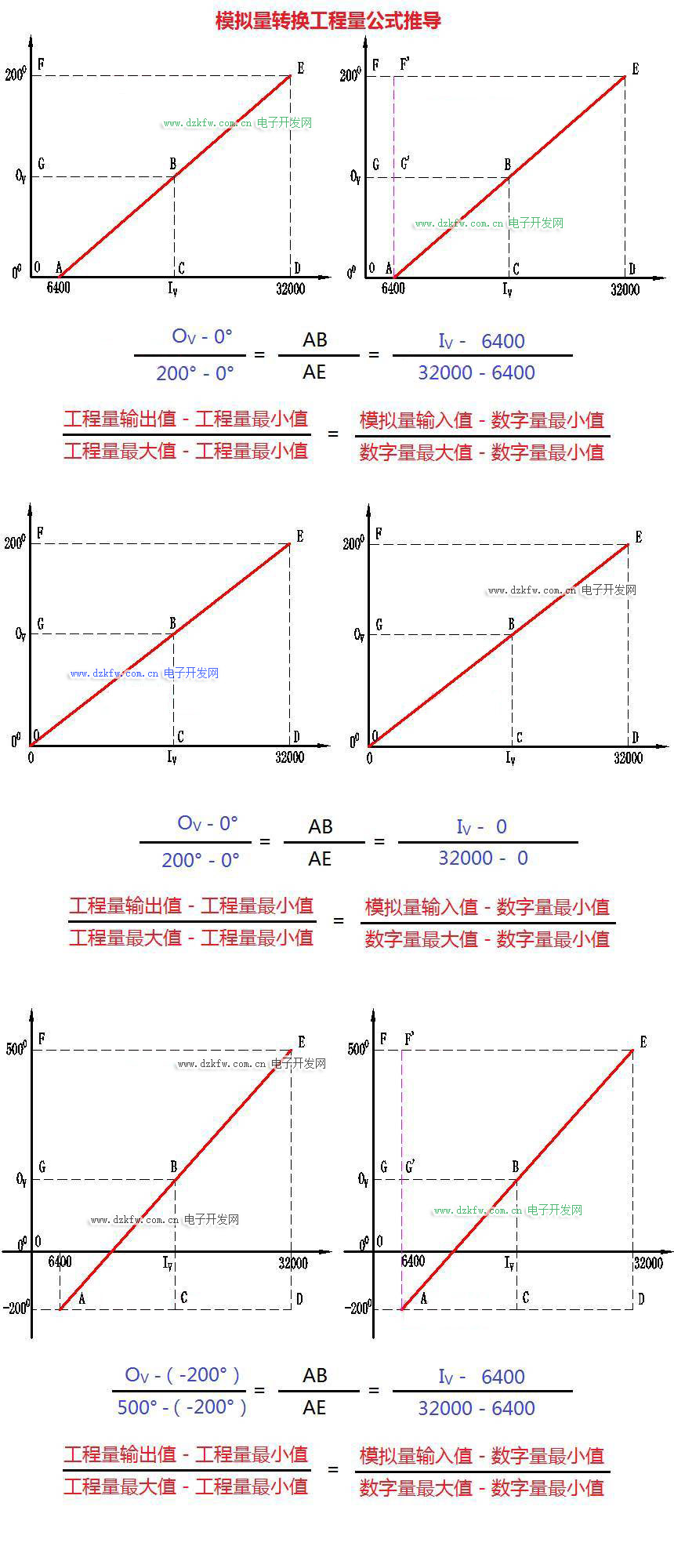
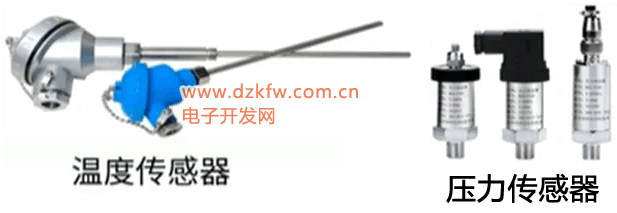
模擬引腳 Arduino UNO板有六個(gè)模擬輸入引腳,A0到A5。這些引腳可以從模擬傳感器(如濕度傳感器或溫度傳感器)讀取信號(hào),并將其轉(zhuǎn)換為可由微處理器讀取的數(shù)字值。 |
| 11 |
微控制器 每個(gè)Arduino板都有自己的微控制器(11)。你可以假設(shè)它作為板的大腦。Arduino上的主IC(集成電路)與板對(duì)板略有不同。微控制器通常是ATMEL公司的。在從Arduino IDE加載新程序之前,你必須知道你的板上有什么IC。此信息位于IC頂部。有關(guān)IC結(jié)構(gòu)和功能的更多詳細(xì)信息,請(qǐng)參閱數(shù)據(jù)表。 |
| 12 |
ICSP引腳 大多數(shù)情況下,ICSP(12)是一個(gè)AVR,一個(gè)由MOSI,MISO,SCK,RESET,VCC和GND組成的Arduino的微型編程頭。它通常被稱(chēng)為SPI(串行外設(shè)接口),可以被認(rèn)為是輸出的“擴(kuò)展”。實(shí)際上,你是將輸出設(shè)備從屬到SPI總線(xiàn)的主機(jī)。 |
| 13 |
電源LED指示燈 當(dāng)你將Arduino插入電源時(shí),此LED指示燈應(yīng)亮起,表明你的電路板已正確通電。如果這個(gè)指示燈不亮,那么連接就出現(xiàn)了問(wèn)題。 |
| 14 |
TX和RX LED 在你的板上,你會(huì)發(fā)現(xiàn)兩個(gè)標(biāo)簽:TX(發(fā)送)和RX(接收)。它們出現(xiàn)在Arduino UNO板的兩個(gè)地方。首先,在數(shù)字引腳0和1處,指示引腳負(fù)責(zé)串行通信。其次,TX和RX LED(13)。發(fā)送串行數(shù)據(jù)時(shí),TX LED以不同的速度閃爍。閃爍速度取決于板所使用的波特率。RX在接收過(guò)程中閃爍。 |
| 15 |
數(shù)字I/O Arduino UNO板有14個(gè)數(shù)字I/O引腳(15)(其中6個(gè)提供PWM(脈寬調(diào)制)輸出),這些引腳可配置為數(shù)字輸入引腳,用于讀取邏輯值(0或1) ;或作為數(shù)字輸出引腳來(lái)驅(qū)動(dòng)不同的模塊,如LED,繼電器等。標(biāo)有“〜”的引腳可用于產(chǎn)生PWM。 |
| 16 |
AREF AREF代表模擬參考。它有時(shí)用于設(shè)置外部參考電壓(0至5伏之間)作為模擬輸入引腳的上限。 |
3. 軟件支持
3.1 IDE:
Arduino提供了Arduino Software IDE,一套以Java編寫(xiě)的跨平臺(tái)應(yīng)用軟件。Arduino Software IDE源自于Processing編程語(yǔ)言以及Wiring計(jì)劃的集成開(kāi)發(fā)環(huán)境。它是被設(shè)計(jì)于介紹程序編寫(xiě)給藝術(shù)家和不熟悉程序設(shè)計(jì)的人們,且包含了一個(gè)擁有語(yǔ)法高亮、括號(hào)匹配、自動(dòng)縮進(jìn)和一鍵編譯并將可執(zhí)行文件燒寫(xiě)入Arduino硬件中的編輯器。
Arduino Software IDE使用與C語(yǔ)言和C++相仿的編程語(yǔ)言,并且提供了包含常見(jiàn)的輸入/輸出函數(shù)的Wiring軟件庫(kù)。在使用GNU toolchain編譯和鏈接后,Arduino Software IDE提供了一個(gè)程序“avrdude”用來(lái)轉(zhuǎn)換可執(zhí)行檔成為能夠燒寫(xiě)入Arduino硬件的固件。
3.2 Sketch:
使用Arduino Software IDE編寫(xiě)的程序被稱(chēng)為“sketch”。一個(gè)典型的Arduino C/C++ sketch程序會(huì)包含兩個(gè)函數(shù),它們會(huì)在編譯后合成為main()函數(shù):
- setup():在程序運(yùn)行開(kāi)始時(shí)會(huì)運(yùn)行一次,用于初始化設(shè)置。
- loop():直到Arduino硬件關(guān)閉前會(huì)重復(fù)運(yùn)行函數(shù)放的代碼。
4. Arduino編程語(yǔ)言
1 2 3 4 5 6 7 8 9 10 | int LED_PIN=13;void setup () { // 初始化副程式,程式起始時(shí)僅執(zhí)行一次 pinMode (LED_PIN, OUTPUT); // 以數(shù)位輸出方式啟用Pin13}void loop () { // loop副程式,重複不斷執(zhí) digitalWrite (LED_PIN, HIGH); // 打開(kāi)LED(發(fā)光二極管) delay (1000); // 等待一秒,delay內(nèi)含數(shù)值1000,代表延遲1000毫秒,即一秒。 digitalWrite (LED_PIN, LOW); // 關(guān)閉LED delay (1000); // 等待一秒} // loop副程式結(jié)束 |
(Arduino的Blink示例程序)
Arduino 程序可由五個(gè)部分組成 :
//1. 導(dǎo)入庫(kù)與定義 (可有可無(wú))
#include <SoftEasyTranfer.h>
#define LEDPIN 13;
//2. 聲明常量與全域變量 (可有可無(wú))
const float PI=3.14159;
int r=0 ;
//3. 初始化函數(shù)setup() (必要)
void setup() {}
//4. 循環(huán)函數(shù)loop() (必要)
void loop() {}
//5. 自定義函數(shù) (可有可無(wú))
float area(float r) {
float a=PI*r*r;
return a;
}
其中 setup() 與 loop() 是一定要有的函數(shù) (均無(wú)參數(shù)無(wú)傳回值), 其他則視需要而定. Arduino 語(yǔ)言采用 C/C++ 語(yǔ)法,加上以 Wiring 為基礎(chǔ)的電子設(shè)計(jì)核心庫(kù)組合而成, 包括 Digital I/O, Analog I/O 等庫(kù). 內(nèi)置的庫(kù)可直接調(diào)用, 但若有使用第三方庫(kù)(例如驅(qū)動(dòng)感測(cè)器模塊所需的庫(kù)), 則必須使用 include 前置指令引入. 此外, 也可以用前置指令 define 定義一個(gè)常量或宏 (表達(dá)式).
前置指令乃 C 編譯器指令, 不屬于 C 語(yǔ)言本身, 其用途有三 :
- 引入頭文件 : 例如 #include <myLibrary.h> 或 "myLibrary.h"
- 定義常量 : 例如 #define PI 3.14159
- 定義宏 : 例如 #define AREA(r) PI*r*r
所以前置指令的功能一言以蔽之就是替換, include 就是在標(biāo)頭處以指定之文件內(nèi)容替換; 而 #define 就是在程序中用到所定義之常量與宏名稱(chēng)時(shí), 以其內(nèi)容替換.
宏的功能事實(shí)上與函數(shù)類(lèi)似, 不同之處是函數(shù)調(diào)用使用堆棧, 而宏則是直接放在源代碼中,由編譯器自動(dòng)進(jìn)行替換,運(yùn)行效率較快 (但若很多地方都要用到時(shí), 編譯后就會(huì)比較大).
注意:
頭文件可用角括號(hào) < > 或雙引號(hào) "", 差別是:
a. 用雙引號(hào)時(shí), 前置處理器會(huì)先從源文件所在位置開(kāi)始去搜索頭文件;
b. 而用角括號(hào)則會(huì)先從 libraries 目錄開(kāi)始找.
5. Arduino 數(shù)據(jù)類(lèi)型
C中的數(shù)據(jù)類(lèi)型是指用于聲明不同類(lèi)型的變量或函數(shù)的擴(kuò)展系統(tǒng)。變量的類(lèi)型確定它在存儲(chǔ)器中占用多少空間以及如何解釋存儲(chǔ)的位模式。下表提供了你將在Arduino編程期間使用的所有數(shù)據(jù)類(lèi)型。
| void | Boolean | char | Unsigned char | byte | int | Unsigned int | word |
| long | Unsigned long | short | float | double | array | String-char array | String-object |
void
void關(guān)鍵字僅用于函數(shù)聲明。它表示該函數(shù)預(yù)計(jì)不會(huì)向調(diào)用它的函數(shù)返回任何信息。
例子
1 2 3 | Void Loop ( ) { // rest of the code} |
Boolean
布爾值保存兩個(gè)值之一,true或false。每個(gè)布爾變量占用一個(gè)字節(jié)的內(nèi)存。
例子
1 2 | boolean val = false ; // declaration of variable with type boolean and initialize it with falseboolean state = true ; // declaration of variable with type boolean and initialize it with false |
Char
一種數(shù)據(jù)類(lèi)型,占用一個(gè)字節(jié)的內(nèi)存,存儲(chǔ)一個(gè)字符值。字符文字用單引號(hào)寫(xiě)成:'A',對(duì)于多個(gè)字符,字符串使用雙引號(hào):"ABC"。
但是,字符是存儲(chǔ)為數(shù)字。你可以在ASCII圖表中查看特定編碼。這意味著可以對(duì)使用ASCII值的字符進(jìn)行算術(shù)運(yùn)算。例如,'A'+1的值為66,因?yàn)榇髮?xiě)字母A的ASCII值為65。
例子
1 2 | Char chr_a = ‘a(chǎn)’ ;//declaration of variable with type char and initialize it with character aChar chr_c = 97 ;//declaration of variable with type char and initialize it with character 97 |
unsigned char
unsigned char是一種無(wú)符號(hào)數(shù)據(jù)類(lèi)型,占用一個(gè)字節(jié)的內(nèi)存。unsigned char數(shù)據(jù)類(lèi)型編碼數(shù)字為0到255。
例子
1 | Unsigned Char chr_y = 121 ; // declaration of variable with type Unsigned char and initialize it with character y |
byte
一個(gè)字節(jié)存儲(chǔ)一個(gè)8位無(wú)符號(hào)數(shù),從0到255。
例子
1 | byte m = 25 ;//declaration of variable with type byte and initialize it with 25 |
int
整數(shù)(int)是數(shù)字存儲(chǔ)的主要數(shù)據(jù)類(lèi)型。int存儲(chǔ)16位(2字節(jié))值。
這產(chǎn)生-32768至32767的范圍(最小值為-2^15,最大值為(2^15)-1)。
int的大小因板而異。例如,在Arduino Due中,int存儲(chǔ)32位(4字節(jié))值。這產(chǎn)生-2147483648至2147483647的范圍(最小值-2^31和最大值(2^31)-1)。
例子
1 | int counter = 32 ;// declaration of variable with type int and initialize it with 32 |
Unsigned int
unsigned int(無(wú)符號(hào)整數(shù))與int相同,存儲(chǔ)2字節(jié)。然而,它們只存儲(chǔ)正值,產(chǎn)生0到65535(2^16)-1的有效范圍。Due存儲(chǔ)4字節(jié)(32位)值,范圍從0到4294967295(2^32-1)。
例子
1 2 | Unsigned int counter = 60 ; // declaration of variable with type unsigned int and initialize it with 60 |
Word
在Uno和其他基于ATMEGA的板上,一個(gè)word存儲(chǔ)一個(gè)16位無(wú)符號(hào)數(shù)。在Due和Zero上,它存儲(chǔ)一個(gè)32位無(wú)符號(hào)數(shù)。
例子
1 | word w = 1000 ;//declaration of variable with type word and initialize it with 1000 |
Long
Long變量是用于數(shù)字存儲(chǔ)的擴(kuò)展大小變量,存儲(chǔ)32位(4字節(jié)),從-2147483648到2147483647。
例子
1 | Long velocity = 102346 ;//declaration of variable with type Long and initialize it with 102346 |
unsigned long
unsigned long變量是用于數(shù)字存儲(chǔ)的擴(kuò)展大小變量,并存儲(chǔ)32位(4字節(jié))。與標(biāo)準(zhǔn)的long不同,unsigned long不會(huì)存儲(chǔ)負(fù)數(shù),它們的范圍為0到4294967295(2^32-1)。
例子
1 2 | Unsigned Long velocity = 101006 ;// declaration of variable with type Unsigned Long and initialize it with 101006 |
short
short是16位數(shù)據(jù)類(lèi)型。在所有Arduinos(基于ATMega和ARM)上,一個(gè)short存儲(chǔ)一個(gè)16位(2字節(jié))值。這產(chǎn)生-32768至32767的范圍(最小值為-2^15,最大值為(2^15)-1)。
例子
1 | short val = 13 ;//declaration of variable with type short and initialize it with 13 |
float
浮點(diǎn)數(shù)的數(shù)據(jù)類(lèi)型是具有小數(shù)點(diǎn)的數(shù)字。浮點(diǎn)數(shù)通常用于近似模擬值和連續(xù)值,因?yàn)樗鼈兊姆直媛矢哂谡麛?shù)。
浮點(diǎn)數(shù)可以大到3.4028235E+38,也可以低到-3.4028235E+38。它們被存儲(chǔ)為32位(4字節(jié))信息。
例子
1 | float num = 1.352;//declaration of variable with type float and initialize it with 1.352 |
double
在Uno和其他基于ATMEGA的板上,雙精度浮點(diǎn)數(shù)占用四個(gè)字節(jié)。也就是說(shuō),double實(shí)現(xiàn)與float完全相同,精度沒(méi)有增益。在Arduino Due上,double具有8字節(jié)(64位)精度。
例子
1 | double num = 45.352 ;// declaration of variable with type double and initialize it with 45.352 |
6. Arduino 變量和常量
在我們開(kāi)始解釋變量類(lèi)型之前,我們需要確定一個(gè)非常重要的主題,稱(chēng)為變量范圍即作用域問(wèn)題。
6.1 什么是變量范圍?
Arduino使用的C語(yǔ)言中的變量具有名為scope(范圍)的屬性。scope是程序的一個(gè)區(qū)域,有三個(gè)地方可以聲明變量。它們是:
- 在函數(shù)或代碼塊內(nèi)部,稱(chēng)為局部變量。
- 在函數(shù)參數(shù)的定義中,稱(chēng)為形式參數(shù)。
- 在所有函數(shù)之外,稱(chēng)為全局變量。
6.2 局部變量
在函數(shù)或代碼塊中聲明的變量是局部變量。它們只能由該函數(shù)或代碼塊中的語(yǔ)句使用。局部變量不能在它們自己之外運(yùn)行。以下是使用局部變量的示例:
1 2 3 4 5 6 7 8 9 | Void setup () {}Void loop () { int x , y ; int z ; Local variable declaration x = 0; y = 0; actual initialization z = 10;} |
6.3 全局變量
全局變量在所有函數(shù)之外定義,通常位于程序的頂部。全局變量將在程序的整個(gè)生命周期中保持其真知。
全局變量可以被任何函數(shù)訪(fǎng)問(wèn)。也就是說(shuō),一個(gè)全局變量可以在整個(gè)程序中聲明后使用。
以下示例使用全局變量和局部變量:
注意:全局變量、靜態(tài)變量、常量應(yīng)使用大寫(xiě)字母來(lái)命名name,防止混淆且有警示作用。
1 2 3 4 5 6 7 8 9 10 11 | Int T , S ; //全局變量大寫(xiě)float c = 0 ; Global variable declarationVoid setup () {}Void loop () { int x , y ; // 局部變量小寫(xiě) int z ; Local variable declaration x = 0; y = 0; actual initialization z = 10;} |
【Questions】
1.什么是單片機(jī)?它與個(gè)人計(jì)算機(jī)有什么不同?
Ans:一臺(tái)能夠工作的計(jì)算機(jī)要有這樣幾個(gè)部份構(gòu)成:中央處理單元CPU(進(jìn)行運(yùn)算、控制)、隨機(jī)存儲(chǔ)器RAM(數(shù)據(jù)存儲(chǔ))、存儲(chǔ)器ROM(程序存儲(chǔ))、輸入/輸出設(shè)備I/O(串行口、并行輸出口等)。在個(gè)人計(jì)算機(jī)(PC)上這些部份被分成若干塊芯片,安裝在一個(gè)被稱(chēng)之為主板的印刷線(xiàn)路板上。而在單片機(jī)中,這些部份全部被做到一塊集成電路芯片中了,所以就稱(chēng)為單片(單芯片)機(jī),而且有一些單片機(jī)中除了上述部份外,還集成了其它部份如模擬量/數(shù)字量轉(zhuǎn)換(A/D)和數(shù)字量/模擬量轉(zhuǎn)換(D/A)等。
2. 為什么用單片機(jī),如Arduino、STm32,etc.
實(shí)際工作中并不是任何涉及計(jì)算和控制的場(chǎng)合都要求處理器或計(jì)算機(jī)有很高的性能,其應(yīng)用的關(guān)鍵在于使用性能(是否夠用)和經(jīng)濟(jì)性(是否有很好的性能價(jià)格比)。



 返回頂部
返回頂部 刷新頁(yè)面
刷新頁(yè)面 下到頁(yè)底
下到頁(yè)底