
SMART的兩種運動控制方式:通信的方式和脈沖的方式。其中,脈沖的方式是指S7-200 SMART CPU發送占空比為50%的脈沖信號給步進/伺服驅動器,從而驅動步進/伺服電機進行運動。
這種占空比為50%的脈沖信號也稱為PTO信號。PTO是英文"Pulse Train Output"的縮寫,中文翻譯為"脈沖串輸出"。PTO信號可以用來進行速度或者方向的控制,根據輸出脈沖信號相位的不同,可以有如下幾種組合:
1)、單相脈沖信號(2路輸出);
2)、雙向脈沖信號(2路輸出);
3)、AB正交相脈沖信號(2路輸出);
4)、單相脈沖信號(1路輸出);
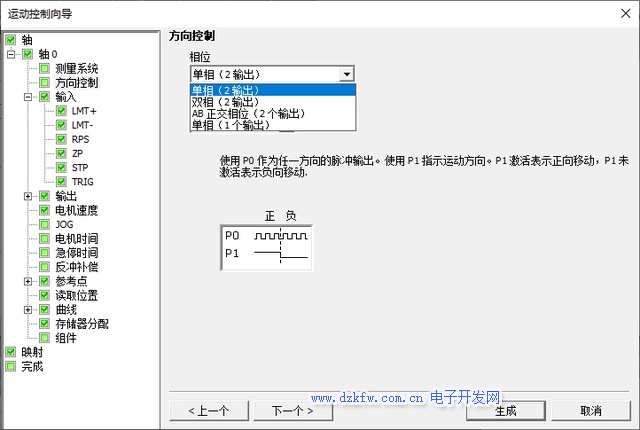
其中,前三種可以根據實際情況選擇不同的極性。(所有這些配置可以在運動控制面板中選擇,后續我們會介紹運動控制面板)。
下面我們來具體介紹下:
1、單相脈沖信號(2路輸出)
前面我們介紹過,每個運動軸有三個輸出信號:P0、P1和DIS信號。
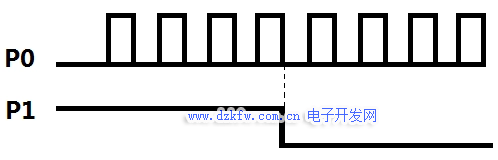
單相脈沖信號(2路輸出)是指用P0來輸出脈沖信號,用P1來指示方向信號。
方向信號可以選擇不同的極性:
當極性為正時,P1為高電平使電機正轉,P1為低電平使電機反轉;
當極性為負時,P1為高電平使電機反轉,P1 為低電平使電機正轉;
該控制方式的脈沖信號示意圖如下:
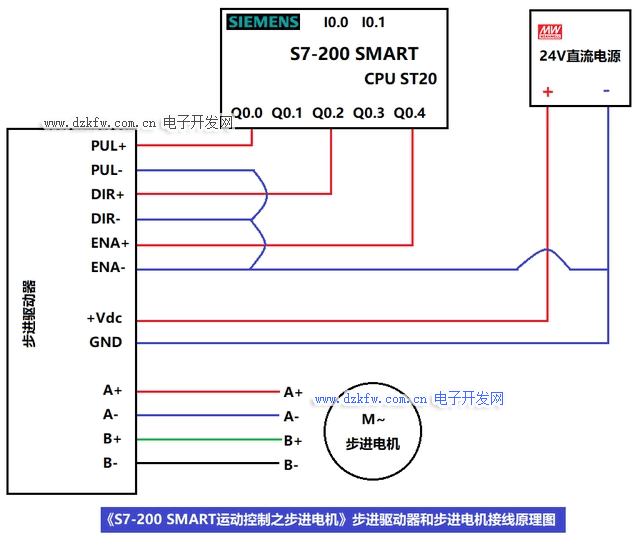
這種方式是使用比較多的控制方式,我們前一篇文章介紹本課程的硬件接線圖時,就是將Q0.0(P0)連接到步進驅動器的脈沖輸入接線端子,將Q0.2(P1)連接到方向控制接線端子,如果忘記了可以回去看一下。至于方向信號的極性可以先不管它,等實際通電調試如果發現電機的轉向與自己要求的不符合,只要修改下極性的正負就好了。硬件接線圖如下:
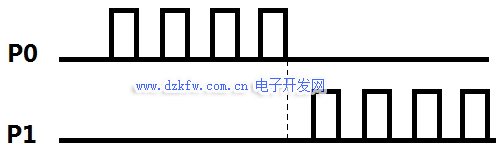
2、雙相脈沖信號(2路輸出)
該方式下P0和P1均輸出PTO脈沖信號,但表示不同的方向。
當極性為正時:P0輸出的脈沖數用于控制電機正轉,P1輸出的脈沖用于控制電機反轉;
當極性為負時:P0輸出的脈沖數用于控制電機反轉,P1輸出的脈沖用于控制電機正轉;
該控制方式的脈沖信號示意圖如下:
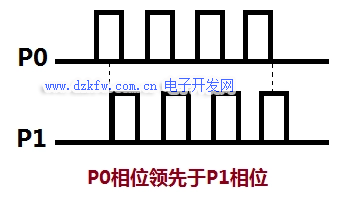
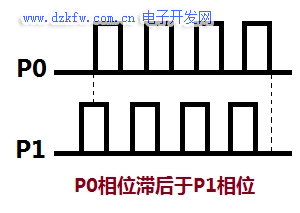
3、A/B正交相脈沖信號(2路輸出)
該方式下P0和P1以相同的速率發出脈沖信號,電機的轉向由P0和P1的相位決定。
當極性為正時:若P0的相位領先于P1的相位,電機正轉;若P0的相位滯后P1的相位,則電機反轉;
當極性為負時:若P0的相位領先于P1的相位,電機反轉;若P0的相位滯后P1的相位,則電機正轉;
該控制方式的脈沖信號示意圖如下:
4、單相脈沖信號(1路輸出)
該方式下僅有P0向外發送脈沖,只能進行一個方向的運動控制;如下圖所示:
好了,關于S7-200SMART輸出PTO脈沖信號的方式就先介紹到這里,后續我們會介紹運動控制面板。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底