
ºtÕ‚æÄþbøÿ «ƒø«∞ π”√◊ÓèV∑∫µƒ“ª∑NÕ®–≈∫Õþbøÿ ÷∂Œ°£”…”⁄ºtÕ‚æÄþbøÿ—b÷√æþ”–Ûw∑e–°°¢π¶∫ƒµÕ°¢π¶ƒÐèä°¢≥…±æµÕµ»Ãÿ¸c£¨“Ú∂¯£¨¿^≤ Îä°¢‰õœÒôC÷Æ∫Û£¨‘⁄‰õ“ÙôC°¢“ÙÌë‘Olj°¢ø’µÚôC“‘º∞ÕÊæþµ»∆‰À¸–°–ÕÎä∆˜—b÷√…œ“≤ºäºä≤…”√ºtÕ‚æÄþbøÿ°£π§òI‘Olj÷–£¨‘⁄∏þâ∫°¢ðó…‰°¢”–∂æö‚Ûw°¢∑€âmµ»≠hæ≥œ¬£¨≤…”√ºtÕ‚æÄþbøÿ≤ªÉHÕÍ»´ø…øø∂¯«“ƒÐ”––ßµÿ∏ÙÎxÎäö‚∏…î_°£
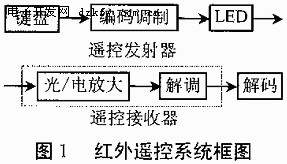
1 ºtÕ‚þbøÿœµΩy
Õ®”√ºtÕ‚þbøÿœµΩy”…∞l…‰∫ÕΩ” ’É…¥Û≤ø∑÷ΩM≥…£¨ë™”√æé/Ω‚¥a壔√ºØ≥…Îä¬∑–æ∆¨ÅÌþM––øÿ÷∆≤Ÿ◊˜£¨»ÁàD1À˘ æ°£∞l…‰≤ø∑÷∞¸¿®ÊI±PæÿÍá°¢æé¥a’{÷∆°¢LEDºtÕ‚∞lÀÕ∆˜£ªΩ” ’≤ø∑÷∞¸¿®π‚°¢ÎäÞDìQ∑≈¥Û∆˜°¢Ω‚’{°¢Ω‚¥aÎä¬∑°£
2 þbøÿ∞l…‰∆˜º∞∆‰æé¥a
þbøÿ∞l…‰∆˜å£”√–æ∆¨∫Ð∂ý£¨∏˘ì˛æé¥a∏Ò Ωø…“‘∑÷≥…√}õ_åí∂»’{÷∆∫Õ√}õ_œýŒª’{÷∆É…¥ÛÓ꣨þ@¿ÔŒ“ÇÉ“‘þ\”√±»ð^èV∑∫£¨Ω‚¥a±»ð^»ð“◊µƒ√}õ_åí∂»’{÷∆Å̺”“‘’f√˜£¨¨F“‘LC7461ΩM≥…∞l…‰Îä¬∑ûÈ¿˝’f√˜æé¥a‘≠¿Ì°£Æî∞l…‰∆˜∞¥ÊI∞¥œ¬∫Û£¨º¥”–þbøÿ¥a∞l≥ˆ£¨À˘∞¥µƒÊI≤ªÕ¨þbøÿæé¥a“≤≤ªÕ¨°£þ@∑Nþbøÿ¥aæþ”–“‘œ¬Ãÿ’˜£∫
≤…”√√}åí’{÷∆µƒ¥Æ––¥a£¨“‘√}åíûÈ0.565ms°¢Èg∏Ù0.56ms°¢÷Ð∆⁄ûÈ1.125msµƒΩM∫œ±Ì æ∂˛þM÷∆µƒ°∞0°±£ª“‘√}åíûÈ0.565ms°¢Èg∏Ù1.685ms°¢÷Ð∆⁄ûÈ2.25msµƒΩM∫œ±Ì æ∂˛þM÷∆µƒ°∞1°±
…œ ˆ°∞0°±∫Õ°∞1°±ΩM≥…µƒ42Œª∂˛þM÷∆¥aΩõ38kHzµƒðdÓlþM––∂˛¥Œ’{÷∆“‘÷∏þ∞l…‰–߬ £¨þ_µΩΩµµÕÎä‘¥π¶∫ƒµƒƒøµƒ°£»ª∫Û‘ŸÕ®þ^ºtÕ‚∞l…‰∂˛òOπÐÆa…˙ºtÕ‚æÄœÚø’Èg∞l…‰£¨
7461Æa…˙µƒþbøÿæé¥a «þB¿mµƒ42Œª∂˛þM÷∆¥aΩM£¨∆‰÷–«∞26ŒªûÈ”√ëÙ◊RÑe¥a£¨ƒÐÖ^Ñe≤ªÕ¨µƒºtÕ‚þbøÿ‘Olj£¨∑¿÷π≤ªÕ¨ôC∑Nþbøÿ¥aª•œý∏…î_°£∫Û16ŒªûÈ8Œªµƒ≤Ÿ◊˜¥a∫Õ8Œªµƒ≤Ÿ◊˜∑¥¥a”√”⁄∫Àå¶îµì˛ «∑ÒΩ” ’ú ¥_°£
Æîþbøÿ∆˜…œ»Œ“‚“ªÇÄ∞¥ÊI∞¥œ¬≥¨þ^36msïr£¨LC7461–æ∆¨µƒ’Ò é∆˜ π–æ∆¨º§ªÓ£¨å¢∞l…‰“ªÇÄÃÿ∂®µƒÕ¨≤Ω¥aÓ^£¨å¶”⁄Ω” ’∂À∂¯—‘æÕ «“ªÇÄ9msµƒµÕÎä∆Ω,∫Õ“ªÇÄ4.5msµƒ∏þÎä∆Ω£¨þ@ÇÄÕ¨≤Ω¥aÓ^ø…“‘ π≥ÖÚ÷™µ¿èƒþ@ÇÄÕ¨≤Ω¥aÓ^“‘∫Ûø…“‘È_ ºΩ” ’îµì˛°£
Ω‚¥aµƒÍPÊI «»Á∫Œ◊RÑe°∞0°±∫Õ°∞1°±£¨èƒŒªµƒ∂®¡xŒ“ÇÉø…“‘∞l¨F°∞0°±°¢°∞1°±æ˘“‘0.56msµƒµÕÎä∆ΩÈ_ º£¨≤ªÕ¨µƒ «∏þÎä∆Ωµƒåí∂»≤ªÕ¨£¨°∞0°±ûÈ0.56ms,°∞1°±ûÈ1.68ms,À˘“‘±ÿÌö∏˘ì˛∏þÎä∆Ωµƒåí∂»Ö^Ñe°∞0°±∫Õ°∞1°±°£»Áπ˚èƒ0.56msµÕÎä∆Ωþ^∫Û£¨È_ º—”ïr£¨0.56ms“‘∫Û£¨»Ù◊xµΩµƒÎä∆Ωûȵգ¨’f√˜‘쌪ûÈ°∞0°±£¨∑¥÷ÆÑtûÈ°∞1°±£¨ûÈ¡Àø…øø∆“䣨—”ïr±ÿÌö±»0.56msÈL–©£¨µ´”÷≤ªƒÐ≥¨þ^1.12ms,∑ÒÑt»Áπ˚‘쌪ûÈ°∞0°±£¨◊xµΩµƒ“— «œ¬“ªŒªµƒ∏þÎä∆Ω£¨“Ú¥À»°£®1.12ms+0.56ms£©/2=0.84ms◊ÓûÈø…øø£¨“ª∞„»°0.84ms◊Û”“º¥ø…°£
∏˘ì˛ºtÕ‚æé¥aµƒ∏Ò Ω£¨≥ÖÚ뙑쵻¥˝9msµƒ∆ º¥a∫Õ4.5msµƒΩYπ˚¥aÕÍ≥…∫Û≤≈ƒÐ◊x¥a°£
»Áπ˚ý]ŸèŒ“ÇÉÈ_∞lµƒ51ÜŒ∆¨ôC‘áÚû∞Â∫ÕîU’π‘™º˛µƒæW”—£¨ø…“‘´@µ√»Á…œàDÀ˘ 浃ºtÕ‚þbøÿ ÷±˙£¨þ@∑Nþbøÿ∆˜µƒæé¥a∏Ò Ω∑˚∫œ…œ√ʵƒ√Ë ˆ“鬅£¨∂¯«“Ér∏ÒµÕ¡Æ£¨”–32ÇÄ∞¥ÊI£¨∞¥ÊIÕ‚–Œ±»ð^Ωy“ª£¨»Áπ˚”√”⁄≈˙¡øÈ_∞l£¨ø…“‘∞—þbøÿ∆˜…œŸNƒ§ìQ≥…ƒ„–Ë“™µƒ◊÷∑˚£¨þ@ûÈÈ_∞lÆa∆∑÷π©¡À±„¿˚°£
Ω” ’∆˜º∞Ω‚¥a
LT0038 «ÀÐ∑‚“ªÛwªØºtÕ‚æÄΩ” ’∆˜£¨À¸ «“ª∑NºØºtÕ‚æÄΩ” ’°¢∑≈¥Û°¢’˚–Œ”⁄“ªÛwµƒºØ≥…Îä¬∑£¨≤ª–Ë“™»Œ∫ŒÕ‚Ω”‘™º˛£¨æÕƒÐÕÍ≥…胺tÕ‚æÄΩ” ’µΩðî≥ˆ≈cTTLÎä∆Ω–≈ÃñºÊ»ðµƒÀ˘”–π§◊˜£¨õ]”–ºtÕ‚þbøÿ–≈ÃñïrûÈ∏þÎä∆Ω£¨ ’µΩºtÕ‚–≈ÃñïrûȵÕÎä∆Ω£¨∂¯Ûw∑e∫Õ∆’Õ®µƒÀÐ∑‚»˝òOπÐ¥Û–°“ªò”£¨À¸þm∫œ”⁄∏˜∑NºtÕ‚æÄþbøÿ∫ÕºtÕ‚æÄîµì˛Ç˜ðî°£
œ¬√Ê «“ªÇÄå¶51åçÚû∞Â≈‰Ã◊µƒºtÕ‚æÄþbøÿ∆˜µƒΩ‚¥a≥Öڣ¨À¸ø…“‘∞—…œàD32ÊIµƒºtÕ‚þbøÿ∆˜√ø“ªÇÄ∞¥ÊIµƒÊI÷µ◊x≥ˆÅÌ£¨≤¢«“Õ®þ^åçÚû∞Â…œP1ø⁄µƒ8ÇÄLEDÔ@ æ≥ˆÅÌ£¨‘⁄Ω‚¥a≥…π¶µƒÕ¨ïr≤¢«“ƒÐ∞l≥ˆ°∞ý÷ý÷ý÷°±µƒÃ· æ“Ù°£
ORG 0000H
AJMP MAIN;ÞD»Î÷˜≥ÖÚ
ORG 0003H ;Õ‚≤ø÷–îýP3.2ƒ_INT0»Îø⁄µÿ÷∑
AJMP INT ;ÞD»ÎÕ‚≤ø÷–îý∑˛Ñ’◊”≥Öڣ®Ω‚¥a≥Öڣ©
;“‘œ¬ûÈ÷˜≥ÖÚþM––CPU÷–îý∑Ω Ω‘O÷√
MAIN: SETB EA ;¥ÚÈ_CPUøÇ÷–îý’à«Û
SETB IT0 ;‘O∂®INT0µƒ”|∞l∑Ω ΩûÈ√}õ_ÿìþÖ—ÿ”|∞l
SETB EX0 ;¥ÚÈ_INT0÷–îý’à«Û
;“‘œ¬å¶ÜŒ∆¨ôCµƒÀ˘”–“˝ƒ_þM––≥ı ºªØ£¨»´≤ø‘O÷√≥…∏þÎä∆Ω
MOV P2,#11100111B
AJMP $
INT: CLR EA;ï∫ïrÍPÈ]CPUµƒÀ˘”–÷–îý’à«Û
MOV R6,#10
SB: ACALL YS1;’{”√882Œ¢√Η”ïr◊”≥ÖÚ
JB P3.2,EXIT;—”ïr882Œ¢√Î∫Û≈–îýP3.2ƒ_ «∑Ò≥ˆ¨F∏þÎä∆Ω»Áπ˚”–æÕÕÀ≥ˆΩ‚¥a≥ÖÚ
DJNZ R6, SB;÷ÿèÕ10¥Œ£¨ƒøµƒ «ôzúy‘⁄8820Œ¢√ÎÉ»»Áπ˚≥ˆ¨F∏þÎä∆ΩæÕÕÀ≥ˆΩ‚¥a≥ÖÚ
;“‘…œÕÍ≥…å¶þbøÿ–≈Ãñµƒ9000Œ¢√εƒ≥ı ºµÕÎä∆Ω–≈Ãñµƒ◊RÑe°£
JNB P3.2, $;µ»¥˝∏þÎä∆Ω±ÐÈ_9∫¡√εÕÎä∆Ω“˝åß√}õ_
ACALL YS2;—”ïr4.74∫¡√αÐÈ_4.5∫¡√εƒΩYπ˚¥a
MOV R7,#26;∫ˆ¬‘«∞26ŒªœµΩy◊RÑe¥a
JJJJA: JNB P3.2,$;µ»¥˝µÿ÷∑¥aµ⁄“ªŒªµƒ∏þÎä∆Ω–≈Ãñ
LCALL YS1;∏þÎä∆ΩÈ_ º∫Û”√882Œ¢√εƒïrÈg≥þ»•≈–îý–≈Ãñ¥Àïrµƒ∏þµÕÎä∆ΩÝÓëB
MOV C,P3.2;å¢P3.2“˝ƒ_¥ÀïrµƒÎä∆ΩÝÓëB0ªÚ1¥Ê»ÎC÷–
JNC UUUA;»Áπ˚ûÈ0æÕïÞDµΩUUUA
LCALL YS3;ôzúyµΩ∏þÎä∆Ω1µƒ‘í—”ïr1∫¡√廥˝√}õ_∏þÎä∆ΩΩY ¯
UUUA: DJNZ R7,JJJJA
MOV R1,#1AH ;‘O∂®1AHûÈ∆ ºRAMÖ^
MOV R2,#2;Ω” ’èƒ1AHµΩ1BHµƒ2ÇÄÉ»¥Ê,”√”⁄¥Ê∑≈≤Ÿ◊˜¥a∫Õ≤Ÿ◊˜∑¥¥a
PP: MOV R3,#8;√øΩMîµì˛ûÈ8Œª
JJJJ: JNB P3.2,$;µ»¥˝µÿ÷∑¥aµ⁄“ªŒªµƒ∏þÎä∆Ω–≈Ãñ
LCALL YS1;∏þÎä∆ΩÈ_ º∫Û”√882Œ¢√εƒïrÈg≥þ»•≈–îý–≈Ãñ¥Àïrµƒ∏þµÕÎä∆ΩÝÓëB
MOV C,P3.2;å¢P3.2“˝ƒ_¥ÀïrµƒÎä∆ΩÝÓëB0ªÚ1¥Ê»ÎC÷–
JNC UUU;»Áπ˚ûÈ0æÕïÞDµΩUUU
LCALL YS3;ôzúyµΩ∏þÎä∆Ω1µƒ‘í—”ïr1∫¡√廥˝√}õ_∏þÎä∆ΩΩY ¯
UUU: MOV A,@R1;å¢R1÷–µÿ÷∑µƒΩoA
RRC A;å¢C÷–µƒ÷µ0ªÚ1“∆»ÎA÷–µƒ◊ÓµÕŒª
MOV @R1,A;å¢A÷–µƒîµï∫ïr¥Ê∑≈‘⁄R1îµ÷µµƒÉ»¥Ê÷–
DJNZ R3,JJJJ;Ω” ’ùM8ŒªìQ“ªÇÄÉ»¥Ê
INC R1;å¶R1÷–µƒ÷µº”1£¨ìQœ¬“ªÇÄRAM
DJNZ R2,PP ;Ω” ’ÕÍ8Œªîµì˛¥a∫Õ8Œªîµì˛∑¥¥a£¨¥Ê∑≈‘⁄1AH/1BH÷–
MOV A,1AH
CPL A;å¶1AH»°∑¥∫Û∫Õ1BH±»ð^
CJNE A,1BH,EXIT;»Áπ˚≤ªµ»±Ì æΩ” ’îµì˛∞l…˙Âe’`,∑≈óâ
MOV P1,1AH;å¢∞¥ÊIµƒÊI÷µÕ®þ^P1ø⁄µƒ8ÇÄLEDÔ@ æ≥ˆÅÌ!
MOV A,1AH;墺tÕ‚þbøÿ∆˜æþÛw∞¥ÊIµƒÊI÷µ∞lÀÕµΩ¥Æø⁄»•
MOV SBUF,A;Õ®þ^¥Æø⁄‘⁄ÎäƒX∆¡ƒª…œÔ@ æ≥ˆÅÌ
CLR P2.5;∑‰¯Q∆˜¯QÌëý÷ý÷ý÷µƒ¬ï“Ù£¨±Ì æΩ‚¥a≥…π¶
LCALL YS2
LCALL YS2
LCALL YS2
SETB P2.5;∑‰¯Q∆˜Õ£÷π
EXIT: SETB EA ;‘ ‘S÷–îý
RETI ;ÕÀ≥ˆΩ‚¥a◊”≥ÖÚ
YS1: MOV R4,#20 ;£®’º”√R4/R5£©—”ïr◊”≥ÖÚ1£¨æ´¥_—”ïr882Œ¢√Î
D1: ;MOV R5,#20 ;æß’ÒûÈ11.0592Mïr,’à”√ ; ◊¢·åµÙ¥À––
MOV R5,#19 ;æß’ÒûÈ12Mïr,’à”√ ; ◊¢·åµÙ¥À––
DJNZ R5,$
DJNZ R4,D1
RET
YS2: MOV R4,#10 ;£®’º”√R4/R5£©—”ïr◊”≥ÖÚ2£¨æ´¥_—”ïr4740Œ¢√Î
D2: ;MOV R5,#235 ;æß’ÒûÈ11.0592Mïr,’à”√ ; ◊¢·åµÙ¥À––
MOV R5,#216 ;æß’ÒûÈ12Mïr,’à”√ ; ◊¢·åµÙ¥À––
DJNZ R5,$
DJNZ R4,D2
RET
YS3: MOV R4,#2;£®’º”√R4/R5£©—”ïr≥ÖÚ3£¨æ´¥_—”ïr1000Œ¢√Î
D3: ;MOV R5,#248 ;æß’ÒûÈ11.0592Mïr,’à”√ ; ◊¢·åµÙ¥À––
MOV R5,#228 ;æß’ÒûÈ12Mïr,’à”√ ; ◊¢·åµÙ¥À––
DJNZ R5,$
DJNZ R4,D3
RET
DELAY: MOV R1,#08H;£®’º”√R1/R2/R3£©—”ïr◊”≥Öڣ¨12Mæß’Ò—”ïrºs250∫¡√Î
L3: MOV R2 ,#0FAH
L1: MOV R3 ,#0FAH
L2: DJNZ R3 ,L2
DJNZ R2 ,L1
DJNZ R1 ,L3
RET
END
keilπ§≥ÃŒƒº˛: hongwai.rar
0A 01
11 12 13 14
15 16 17 18
19 10 1A 1B
0E 02 03 1C
06 04 05 0C
0D 08 09 1D
00 1F 1E 0B
07 0F
þ@ «∞¥’’ºtÕ‚þbøÿ∆˜∞¥ÊIµƒåçÎHŒª÷√Ωo≥ˆµƒ32ÇÄ∞¥ÊIµƒÊI÷µ£®16þM÷∆£©
1 ºtÕ‚þbøÿœµΩy
Õ®”√ºtÕ‚þbøÿœµΩy”…∞l…‰∫ÕΩ” ’É…¥Û≤ø∑÷ΩM≥…£¨ë™”√æé/Ω‚¥a壔√ºØ≥…Îä¬∑–æ∆¨ÅÌþM––øÿ÷∆≤Ÿ◊˜£¨»ÁàD1À˘ æ°£∞l…‰≤ø∑÷∞¸¿®ÊI±PæÿÍá°¢æé¥a’{÷∆°¢LEDºtÕ‚∞lÀÕ∆˜£ªΩ” ’≤ø∑÷∞¸¿®π‚°¢ÎäÞDìQ∑≈¥Û∆˜°¢Ω‚’{°¢Ω‚¥aÎä¬∑°£
2 þbøÿ∞l…‰∆˜º∞∆‰æé¥a
þbøÿ∞l…‰∆˜å£”√–æ∆¨∫Ð∂ý£¨∏˘ì˛æé¥a∏Ò Ωø…“‘∑÷≥…√}õ_åí∂»’{÷∆∫Õ√}õ_œýŒª’{÷∆É…¥ÛÓ꣨þ@¿ÔŒ“ÇÉ“‘þ\”√±»ð^èV∑∫£¨Ω‚¥a±»ð^»ð“◊µƒ√}õ_åí∂»’{÷∆Å̺”“‘’f√˜£¨¨F“‘LC7461ΩM≥…∞l…‰Îä¬∑ûÈ¿˝’f√˜æé¥a‘≠¿Ì°£Æî∞l…‰∆˜∞¥ÊI∞¥œ¬∫Û£¨º¥”–þbøÿ¥a∞l≥ˆ£¨À˘∞¥µƒÊI≤ªÕ¨þbøÿæé¥a“≤≤ªÕ¨°£þ@∑Nþbøÿ¥aæþ”–“‘œ¬Ãÿ’˜£∫
≤…”√√}åí’{÷∆µƒ¥Æ––¥a£¨“‘√}åíûÈ0.565ms°¢Èg∏Ù0.56ms°¢÷Ð∆⁄ûÈ1.125msµƒΩM∫œ±Ì æ∂˛þM÷∆µƒ°∞0°±£ª“‘√}åíûÈ0.565ms°¢Èg∏Ù1.685ms°¢÷Ð∆⁄ûÈ2.25msµƒΩM∫œ±Ì æ∂˛þM÷∆µƒ°∞1°±
…œ ˆ°∞0°±∫Õ°∞1°±ΩM≥…µƒ42Œª∂˛þM÷∆¥aΩõ38kHzµƒðdÓlþM––∂˛¥Œ’{÷∆“‘÷∏þ∞l…‰–߬ £¨þ_µΩΩµµÕÎä‘¥π¶∫ƒµƒƒøµƒ°£»ª∫Û‘ŸÕ®þ^ºtÕ‚∞l…‰∂˛òOπÐÆa…˙ºtÕ‚æÄœÚø’Èg∞l…‰£¨
7461Æa…˙µƒþbøÿæé¥a «þB¿mµƒ42Œª∂˛þM÷∆¥aΩM£¨∆‰÷–«∞26ŒªûÈ”√ëÙ◊RÑe¥a£¨ƒÐÖ^Ñe≤ªÕ¨µƒºtÕ‚þbøÿ‘Olj£¨∑¿÷π≤ªÕ¨ôC∑Nþbøÿ¥aª•œý∏…î_°£∫Û16ŒªûÈ8Œªµƒ≤Ÿ◊˜¥a∫Õ8Œªµƒ≤Ÿ◊˜∑¥¥a”√”⁄∫Àå¶îµì˛ «∑ÒΩ” ’ú ¥_°£
Æîþbøÿ∆˜…œ»Œ“‚“ªÇÄ∞¥ÊI∞¥œ¬≥¨þ^36msïr£¨LC7461–æ∆¨µƒ’Ò é∆˜ π–æ∆¨º§ªÓ£¨å¢∞l…‰“ªÇÄÃÿ∂®µƒÕ¨≤Ω¥aÓ^£¨å¶”⁄Ω” ’∂À∂¯—‘æÕ «“ªÇÄ9msµƒµÕÎä∆Ω,∫Õ“ªÇÄ4.5msµƒ∏þÎä∆Ω£¨þ@ÇÄÕ¨≤Ω¥aÓ^ø…“‘ π≥ÖÚ÷™µ¿èƒþ@ÇÄÕ¨≤Ω¥aÓ^“‘∫Ûø…“‘È_ ºΩ” ’îµì˛°£
Ω‚¥aµƒÍPÊI «»Á∫Œ◊RÑe°∞0°±∫Õ°∞1°±£¨èƒŒªµƒ∂®¡xŒ“ÇÉø…“‘∞l¨F°∞0°±°¢°∞1°±æ˘“‘0.56msµƒµÕÎä∆ΩÈ_ º£¨≤ªÕ¨µƒ «∏þÎä∆Ωµƒåí∂»≤ªÕ¨£¨°∞0°±ûÈ0.56ms,°∞1°±ûÈ1.68ms,À˘“‘±ÿÌö∏˘ì˛∏þÎä∆Ωµƒåí∂»Ö^Ñe°∞0°±∫Õ°∞1°±°£»Áπ˚èƒ0.56msµÕÎä∆Ωþ^∫Û£¨È_ º—”ïr£¨0.56ms“‘∫Û£¨»Ù◊xµΩµƒÎä∆Ωûȵգ¨’f√˜‘쌪ûÈ°∞0°±£¨∑¥÷ÆÑtûÈ°∞1°±£¨ûÈ¡Àø…øø∆“䣨—”ïr±ÿÌö±»0.56msÈL–©£¨µ´”÷≤ªƒÐ≥¨þ^1.12ms,∑ÒÑt»Áπ˚‘쌪ûÈ°∞0°±£¨◊xµΩµƒ“— «œ¬“ªŒªµƒ∏þÎä∆Ω£¨“Ú¥À»°£®1.12ms+0.56ms£©/2=0.84ms◊ÓûÈø…øø£¨“ª∞„»°0.84ms◊Û”“º¥ø…°£
∏˘ì˛ºtÕ‚æé¥aµƒ∏Ò Ω£¨≥ÖÚ뙑쵻¥˝9msµƒ∆ º¥a∫Õ4.5msµƒΩYπ˚¥aÕÍ≥…∫Û≤≈ƒÐ◊x¥a°£
»Áπ˚ý]ŸèŒ“ÇÉÈ_∞lµƒ51ÜŒ∆¨ôC‘áÚû∞Â∫ÕîU’π‘™º˛µƒæW”—£¨ø…“‘´@µ√»Á…œàDÀ˘ 浃ºtÕ‚þbøÿ ÷±˙£¨þ@∑Nþbøÿ∆˜µƒæé¥a∏Ò Ω∑˚∫œ…œ√ʵƒ√Ë ˆ“鬅£¨∂¯«“Ér∏ÒµÕ¡Æ£¨”–32ÇÄ∞¥ÊI£¨∞¥ÊIÕ‚–Œ±»ð^Ωy“ª£¨»Áπ˚”√”⁄≈˙¡øÈ_∞l£¨ø…“‘∞—þbøÿ∆˜…œŸNƒ§ìQ≥…ƒ„–Ë“™µƒ◊÷∑˚£¨þ@ûÈÈ_∞lÆa∆∑÷π©¡À±„¿˚°£
Ω” ’∆˜º∞Ω‚¥a
LT0038 «ÀÐ∑‚“ªÛwªØºtÕ‚æÄΩ” ’∆˜£¨À¸ «“ª∑NºØºtÕ‚æÄΩ” ’°¢∑≈¥Û°¢’˚–Œ”⁄“ªÛwµƒºØ≥…Îä¬∑£¨≤ª–Ë“™»Œ∫ŒÕ‚Ω”‘™º˛£¨æÕƒÐÕÍ≥…胺tÕ‚æÄΩ” ’µΩðî≥ˆ≈cTTLÎä∆Ω–≈ÃñºÊ»ðµƒÀ˘”–π§◊˜£¨õ]”–ºtÕ‚þbøÿ–≈ÃñïrûÈ∏þÎä∆Ω£¨ ’µΩºtÕ‚–≈ÃñïrûȵÕÎä∆Ω£¨∂¯Ûw∑e∫Õ∆’Õ®µƒÀÐ∑‚»˝òOπÐ¥Û–°“ªò”£¨À¸þm∫œ”⁄∏˜∑NºtÕ‚æÄþbøÿ∫ÕºtÕ‚æÄîµì˛Ç˜ðî°£
œ¬√Ê «“ªÇÄå¶51åçÚû∞Â≈‰Ã◊µƒºtÕ‚æÄþbøÿ∆˜µƒΩ‚¥a≥Öڣ¨À¸ø…“‘∞—…œàD32ÊIµƒºtÕ‚þbøÿ∆˜√ø“ªÇÄ∞¥ÊIµƒÊI÷µ◊x≥ˆÅÌ£¨≤¢«“Õ®þ^åçÚû∞Â…œP1ø⁄µƒ8ÇÄLEDÔ@ æ≥ˆÅÌ£¨‘⁄Ω‚¥a≥…π¶µƒÕ¨ïr≤¢«“ƒÐ∞l≥ˆ°∞ý÷ý÷ý÷°±µƒÃ· æ“Ù°£
ORG 0000H
AJMP MAIN;ÞD»Î÷˜≥ÖÚ
ORG 0003H ;Õ‚≤ø÷–îýP3.2ƒ_INT0»Îø⁄µÿ÷∑
AJMP INT ;ÞD»ÎÕ‚≤ø÷–îý∑˛Ñ’◊”≥Öڣ®Ω‚¥a≥Öڣ©
;“‘œ¬ûÈ÷˜≥ÖÚþM––CPU÷–îý∑Ω Ω‘O÷√
MAIN: SETB EA ;¥ÚÈ_CPUøÇ÷–îý’à«Û
SETB IT0 ;‘O∂®INT0µƒ”|∞l∑Ω ΩûÈ√}õ_ÿìþÖ—ÿ”|∞l
SETB EX0 ;¥ÚÈ_INT0÷–îý’à«Û
;“‘œ¬å¶ÜŒ∆¨ôCµƒÀ˘”–“˝ƒ_þM––≥ı ºªØ£¨»´≤ø‘O÷√≥…∏þÎä∆Ω
MOV P2,#11100111B
AJMP $
INT: CLR EA;ï∫ïrÍPÈ]CPUµƒÀ˘”–÷–îý’à«Û
MOV R6,#10
SB: ACALL YS1;’{”√882Œ¢√Η”ïr◊”≥ÖÚ
JB P3.2,EXIT;—”ïr882Œ¢√Î∫Û≈–îýP3.2ƒ_ «∑Ò≥ˆ¨F∏þÎä∆Ω»Áπ˚”–æÕÕÀ≥ˆΩ‚¥a≥ÖÚ
DJNZ R6, SB;÷ÿèÕ10¥Œ£¨ƒøµƒ «ôzúy‘⁄8820Œ¢√ÎÉ»»Áπ˚≥ˆ¨F∏þÎä∆ΩæÕÕÀ≥ˆΩ‚¥a≥ÖÚ
;“‘…œÕÍ≥…å¶þbøÿ–≈Ãñµƒ9000Œ¢√εƒ≥ı ºµÕÎä∆Ω–≈Ãñµƒ◊RÑe°£
JNB P3.2, $;µ»¥˝∏þÎä∆Ω±ÐÈ_9∫¡√εÕÎä∆Ω“˝åß√}õ_
ACALL YS2;—”ïr4.74∫¡√αÐÈ_4.5∫¡√εƒΩYπ˚¥a
MOV R7,#26;∫ˆ¬‘«∞26ŒªœµΩy◊RÑe¥a
JJJJA: JNB P3.2,$;µ»¥˝µÿ÷∑¥aµ⁄“ªŒªµƒ∏þÎä∆Ω–≈Ãñ
LCALL YS1;∏þÎä∆ΩÈ_ º∫Û”√882Œ¢√εƒïrÈg≥þ»•≈–îý–≈Ãñ¥Àïrµƒ∏þµÕÎä∆ΩÝÓëB
MOV C,P3.2;å¢P3.2“˝ƒ_¥ÀïrµƒÎä∆ΩÝÓëB0ªÚ1¥Ê»ÎC÷–
JNC UUUA;»Áπ˚ûÈ0æÕïÞDµΩUUUA
LCALL YS3;ôzúyµΩ∏þÎä∆Ω1µƒ‘í—”ïr1∫¡√廥˝√}õ_∏þÎä∆ΩΩY ¯
UUUA: DJNZ R7,JJJJA
MOV R1,#1AH ;‘O∂®1AHûÈ∆ ºRAMÖ^
MOV R2,#2;Ω” ’èƒ1AHµΩ1BHµƒ2ÇÄÉ»¥Ê,”√”⁄¥Ê∑≈≤Ÿ◊˜¥a∫Õ≤Ÿ◊˜∑¥¥a
PP: MOV R3,#8;√øΩMîµì˛ûÈ8Œª
JJJJ: JNB P3.2,$;µ»¥˝µÿ÷∑¥aµ⁄“ªŒªµƒ∏þÎä∆Ω–≈Ãñ
LCALL YS1;∏þÎä∆ΩÈ_ º∫Û”√882Œ¢√εƒïrÈg≥þ»•≈–îý–≈Ãñ¥Àïrµƒ∏þµÕÎä∆ΩÝÓëB
MOV C,P3.2;å¢P3.2“˝ƒ_¥ÀïrµƒÎä∆ΩÝÓëB0ªÚ1¥Ê»ÎC÷–
JNC UUU;»Áπ˚ûÈ0æÕïÞDµΩUUU
LCALL YS3;ôzúyµΩ∏þÎä∆Ω1µƒ‘í—”ïr1∫¡√廥˝√}õ_∏þÎä∆ΩΩY ¯
UUU: MOV A,@R1;å¢R1÷–µÿ÷∑µƒΩoA
RRC A;å¢C÷–µƒ÷µ0ªÚ1“∆»ÎA÷–µƒ◊ÓµÕŒª
MOV @R1,A;å¢A÷–µƒîµï∫ïr¥Ê∑≈‘⁄R1îµ÷µµƒÉ»¥Ê÷–
DJNZ R3,JJJJ;Ω” ’ùM8ŒªìQ“ªÇÄÉ»¥Ê
INC R1;å¶R1÷–µƒ÷µº”1£¨ìQœ¬“ªÇÄRAM
DJNZ R2,PP ;Ω” ’ÕÍ8Œªîµì˛¥a∫Õ8Œªîµì˛∑¥¥a£¨¥Ê∑≈‘⁄1AH/1BH÷–
MOV A,1AH
CPL A;å¶1AH»°∑¥∫Û∫Õ1BH±»ð^
CJNE A,1BH,EXIT;»Áπ˚≤ªµ»±Ì æΩ” ’îµì˛∞l…˙Âe’`,∑≈óâ
MOV P1,1AH;å¢∞¥ÊIµƒÊI÷µÕ®þ^P1ø⁄µƒ8ÇÄLEDÔ@ æ≥ˆÅÌ!
MOV A,1AH;墺tÕ‚þbøÿ∆˜æþÛw∞¥ÊIµƒÊI÷µ∞lÀÕµΩ¥Æø⁄»•
MOV SBUF,A;Õ®þ^¥Æø⁄‘⁄ÎäƒX∆¡ƒª…œÔ@ æ≥ˆÅÌ
CLR P2.5;∑‰¯Q∆˜¯QÌëý÷ý÷ý÷µƒ¬ï“Ù£¨±Ì æΩ‚¥a≥…π¶
LCALL YS2
LCALL YS2
LCALL YS2
SETB P2.5;∑‰¯Q∆˜Õ£÷π
EXIT: SETB EA ;‘ ‘S÷–îý
RETI ;ÕÀ≥ˆΩ‚¥a◊”≥ÖÚ
YS1: MOV R4,#20 ;£®’º”√R4/R5£©—”ïr◊”≥ÖÚ1£¨æ´¥_—”ïr882Œ¢√Î
D1: ;MOV R5,#20 ;æß’ÒûÈ11.0592Mïr,’à”√ ; ◊¢·åµÙ¥À––
MOV R5,#19 ;æß’ÒûÈ12Mïr,’à”√ ; ◊¢·åµÙ¥À––
DJNZ R5,$
DJNZ R4,D1
RET
YS2: MOV R4,#10 ;£®’º”√R4/R5£©—”ïr◊”≥ÖÚ2£¨æ´¥_—”ïr4740Œ¢√Î
D2: ;MOV R5,#235 ;æß’ÒûÈ11.0592Mïr,’à”√ ; ◊¢·åµÙ¥À––
MOV R5,#216 ;æß’ÒûÈ12Mïr,’à”√ ; ◊¢·åµÙ¥À––
DJNZ R5,$
DJNZ R4,D2
RET
YS3: MOV R4,#2;£®’º”√R4/R5£©—”ïr≥ÖÚ3£¨æ´¥_—”ïr1000Œ¢√Î
D3: ;MOV R5,#248 ;æß’ÒûÈ11.0592Mïr,’à”√ ; ◊¢·åµÙ¥À––
MOV R5,#228 ;æß’ÒûÈ12Mïr,’à”√ ; ◊¢·åµÙ¥À––
DJNZ R5,$
DJNZ R4,D3
RET
DELAY: MOV R1,#08H;£®’º”√R1/R2/R3£©—”ïr◊”≥Öڣ¨12Mæß’Ò—”ïrºs250∫¡√Î
L3: MOV R2 ,#0FAH
L1: MOV R3 ,#0FAH
L2: DJNZ R3 ,L2
DJNZ R2 ,L1
DJNZ R1 ,L3
RET
END
keilπ§≥ÃŒƒº˛: hongwai.rar
0A 01
11 12 13 14
15 16 17 18
19 10 1A 1B
0E 02 03 1C
06 04 05 0C
0D 08 09 1D
00 1F 1E 0B
07 0F
þ@ «∞¥’’ºtÕ‚þbøÿ∆˜∞¥ÊIµƒåçÎHŒª÷√Ωo≥ˆµƒ32ÇÄ∞¥ÊIµƒÊI÷µ£®16þM÷∆£©
 ∑µªÿÌî≤ø
∑µªÿÌî≤ø À¢–¬Ìì√Ê
À¢–¬Ìì√Ê œ¬µΩÌìµ◊
œ¬µΩÌìµ◊