
【實例 14 】四臺電動機順序定時啟動,同時停止
1.PLC 控制任務說明 用按鈕控制四臺電動機:按下啟動按鈕,先啟動第一臺電動機后,每隔 5s 啟動一臺電動機,直至第四臺電動機啟動完畢;按下停止按鈕,四臺電動機同時停止運轉。
2. 電氣接線
表 3-3 為輸入 / 輸出元件及其控制功能。
圖 3-8 為四臺電動機順序定時啟動、同時停止的電氣接線。
圖 中,停止按鈕SB2 采用常開觸點。
表 3-3 輸入 / 輸出元件及其控制功能
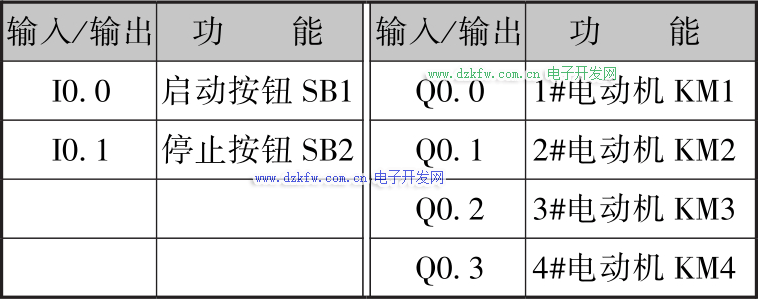
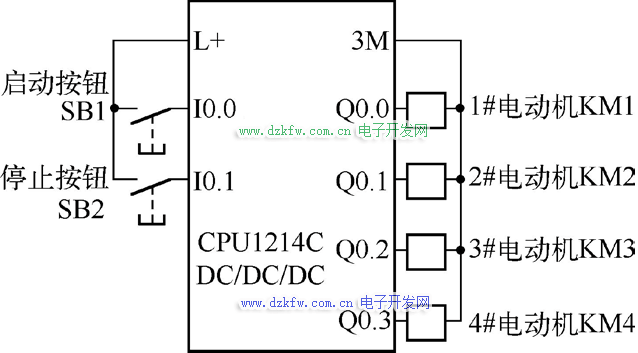
圖 3-8 四臺電動機順序定時啟動、同時停止的電氣接線
3.PLC 編程
圖 3-9 為四臺電動機順序定時啟動、同時停止的時序圖,即按下啟動按鈕, Q0.0 先置位,第一臺電動機啟動,同時定時器1 開始計時, 5s 后, Q0.1 置位,第二臺電動機啟動,依次 5s 后,第三臺電動機啟動,第四臺電動機啟動;按下停止按鈕后,所有的電動機都復位,停止運轉。

圖 3-9 四臺電動機順序定時啟動、同時停止的時序圖
圖 3-10 為四臺電動機順序定時啟動、同時停止的 PLC 梯形圖。圖中用到三個定時器,調用三 個 DB 塊,如圖 3-11 所示。
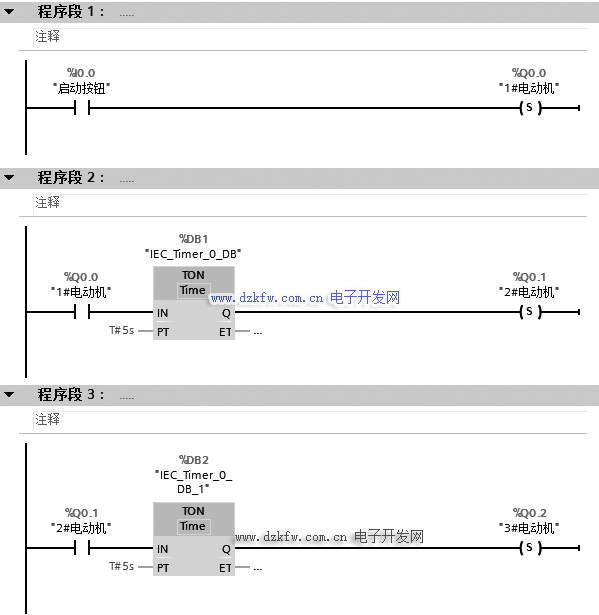
圖 3-10 四臺電動機順序定時啟動、同時停止的 PLC 梯形圖
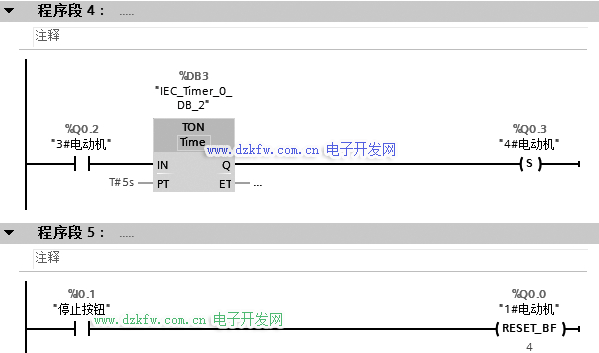
圖 3-10 四臺電動機順序定時啟動、同時停止的 PLC 梯形圖(續)

圖 3-11 調用三個 DB 塊
當用戶直接為定時器指定單一背景數據塊時,該數據塊僅包括一個 IEC_Timer 類型的變量。其優點
是易于用戶區分多個定時器;缺點是當使用多個定時器時,會導致出現多個獨立的數據塊,程序結構顯得零散。為解決這個問題,全局數據塊定義一個IEC_Timer 類型的變量供定時器使用。其優點是不會因為使用多個定時器而造成增加多個數據塊。
圖 3-12 為添加新數據塊(全局 DB )。添加的數據類型可以包括很多。三個定時器 IEC_TIMER 如圖 3-13所示。表 3-4 為【實例 14 】增加的一個全局數據塊 DB1 中的內容,并可以將原來的程序(程序段 2 )修改為如圖3-14 所示的程序。
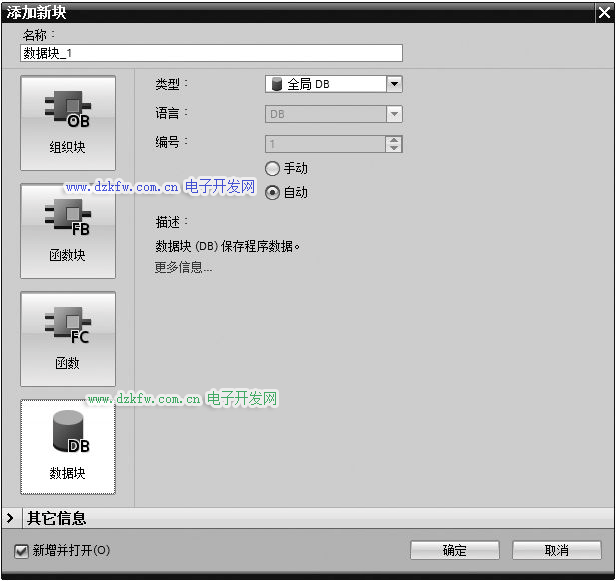
圖 3-12 添加新數據塊(全局 DB )
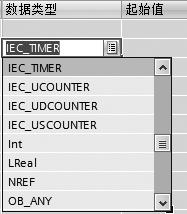
圖 3-13 三個定時器 IEC_TIMER
表 3-4 【實例 14 】增加的一個全局數據塊 DB1 中的內容

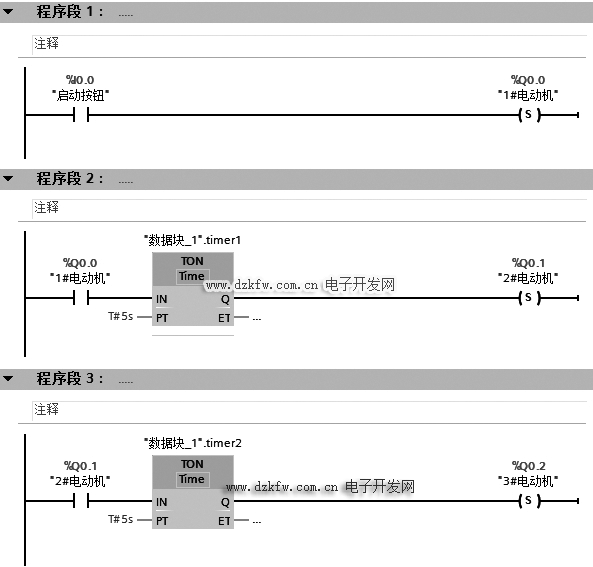
圖 3-14 修改后的梯形圖
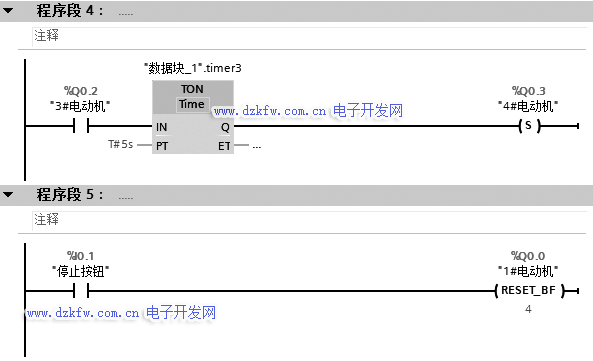
圖 3-14 修改后的梯形圖(續)
3.2.2 【實例 15 】四臺電動機順序定時啟動,順序定時停止
1.PLC 控制任務說明
用按鈕控制四臺電動機:按下啟動按鈕,先啟動第一臺電動機后,每隔 5s 啟動一臺電動機,直至第
四臺電動機啟動完畢;按下停止按鈕,先停止第一臺電動機后,每隔 5s 停止一臺電動機,直至第四臺電動機停止完畢。
2. 電氣接線
四臺電動機順序定時啟動、順序定時停止的電氣接線與【實例 14 】的電氣接線相同。
3.PLC 編程
圖 3-15 為四臺電動機順序定時啟動、順序定時停止的時序圖,即按下啟動按鈕, Q0.0 先置位,第一臺電動機啟動,同時定時器1 開始計時, 5s 后, Q0.1 置位,第二臺電動機啟動,依次 5s 后,第三臺電動機啟動,第四臺電動機啟動;按下停止按鈕后,第一臺電動機先停機,5s 后,第二臺電動機停機,依次5s 后,第三臺、第四臺電動機相繼停機。
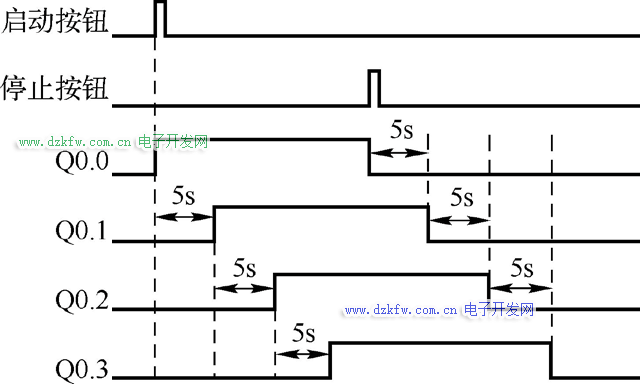
圖 3-15 四臺電動機順序定時啟動、順序定時停止的時序圖
四臺電動機順序定時啟動、順序定時停止的 PLC 梯形圖如圖 3-16 所示,與【實例 14 】相比,程序 段1 ~程序段 4 相同,區別在于停止方式,即在全局 DB 塊中定義三個順序定時啟動定時器和三個順序停 止定時定時器,分別為“ 數據塊 _1”.timer1 到 “ 數據塊 _1”.timer6 。程序段 5 ~程序段 8 為順序停止過程。
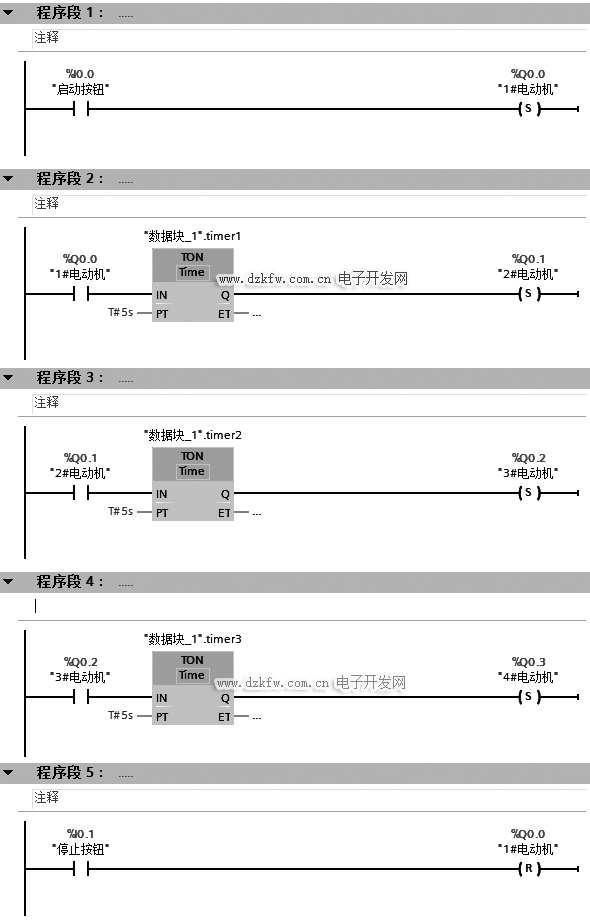
圖 3-16 四臺電動機順序定時啟動、順序定時停止的 PLC 梯形圖

圖 3-16 四臺電動機順序定時啟動、順序定時停止的 PLC 梯形圖(續)
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底