


這是一款專業的兩相步進電機驅動。可實現正反轉控制,通過3 位 撥碼開關選擇7 檔細分控制(1,2/A,2/B,4,8,16,32,),通過3位撥碼開關選 擇8 檔電流控制(0.5A ,1A,1.5A,2A,2.5A,2.8A,3.0A,3.5A)。適合驅動57、42 型兩 相、四相混合 式步進電機。能達到低振動、小噪聲、高速度的效果驅動電機。
輸入輸出說明1.信號輸入
PUL+:脈沖信號輸入正。
PUL-:脈沖信號輸入負。
DIR+:電機正、反轉控制正。
DIR-:電機正、反轉控制負。
EN+:電機脫機控制正。
EN-:電機脫機控制負。
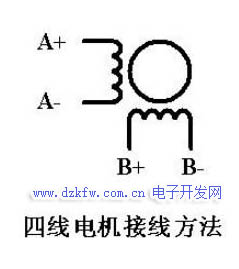
2.電機連接
A+:連接電機繞組A+相。
A-:連接電機繞組A-相。
B+:連接電機繞組B+相。
B-:連接電機繞組B-相。
3.電源電壓連接
VCC:電源正端“+”
GND:電源負端“-”
注意:DC9-40V。 不可以超過此范圍,否則會無法正常工作甚至損壞驅動器.
接線說明共陽極接法:分別將PUL+,DIR+,EN+連接到控制系統的電源上, 如果此 電源是+5V 則可直接接入,如果此電源大于+5V,則須外部另加限流 電阻R ,保證給驅動器內部光藕提供8—15mA 的驅動電流。脈沖輸入信號通 過CP- 接入,方向信號通過DIR-接入,使能信號通過EN-接入。
注:EN端可不接,EN有效時電機轉子處于自由狀態(脫機狀態),這時 可以手動轉動電機轉軸,做適合您的調節。手動調節完成后,再將 EN 設為 無效狀態, 以繼續自動控制。
電機接線
1.細分數設定
細分數是以驅動板上的撥碼開關選擇設定的,用戶可根據驅動器外 盒上 的細分選擇表的數據設定(最好在斷電情況下設定)。細分后步進 電機步距 角按下列方法計算:步距角=電機固有步距角/細分數。如:一 臺固有步距角 為1.8°的步進電機在4細分下步距角為1.8°/4=0.45° 驅動板上撥碼開關1、2、3、分別對應S1、S2、S3.

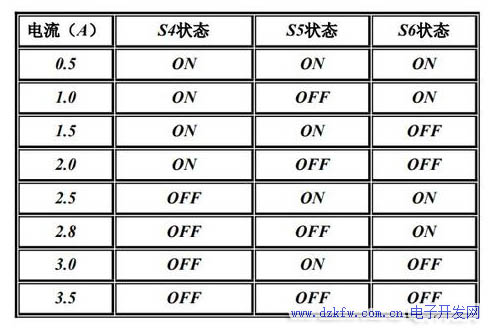
2.電流大小設定
驅動板上撥碼開關4、5、6分別對應S4、S5、S6.
打開脫機功能后,電機轉子處于自由不鎖定狀態,可以輕松轉動,此時 輸 入脈沖信號不響應,關閉此信號后電機接受脈沖信號正常運轉。
注:一般在實際應用中可不接。
程序實例1.已知條件:
X0正向
X1反向
X2停止
X3脫機
X4回零
X5原點
Y0脈沖信號
Y3方向信號
Y4脫機信號
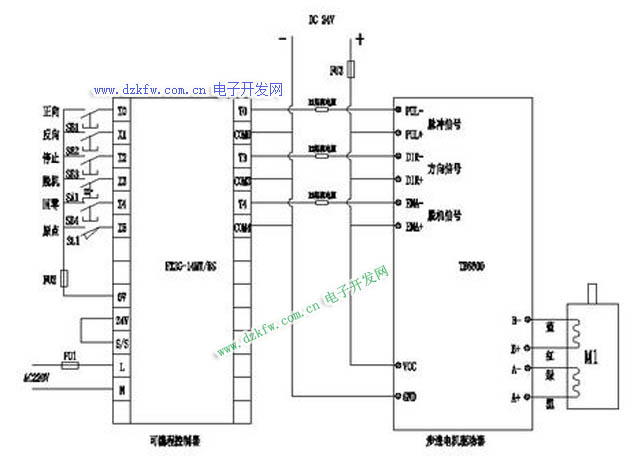
電氣原理圖
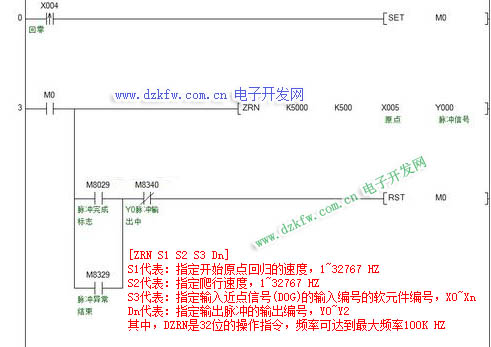
原點回歸指令
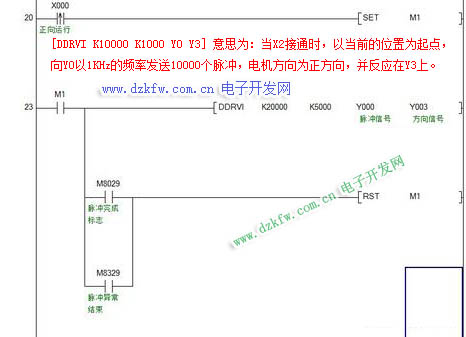
正向運行
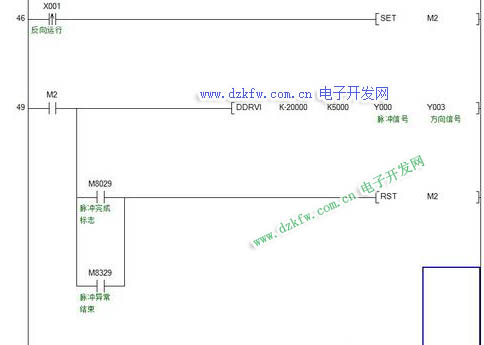
反向運行
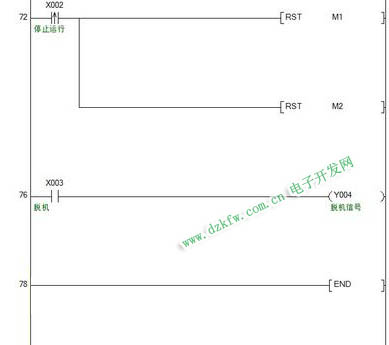
停止運行
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底