
系統的框架如下圖
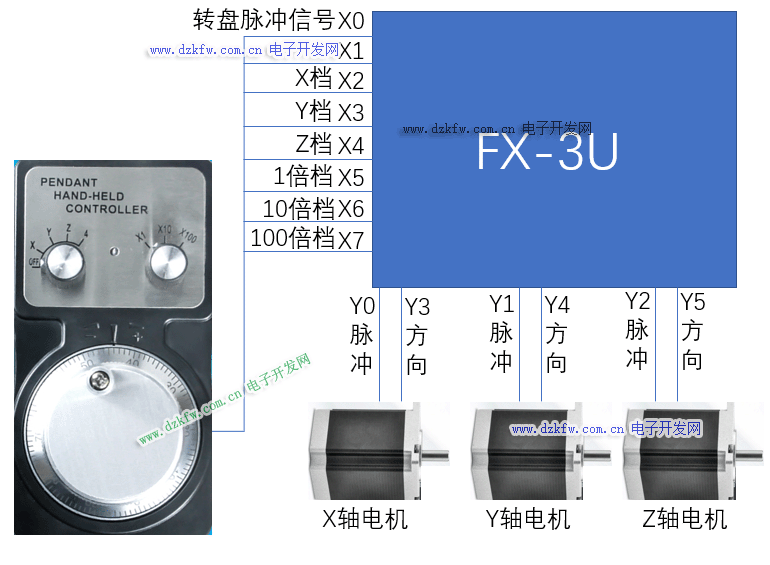
一臺3U的plc,控制了3臺步進電機,分別控制了X、Y、Z這3個軸,PLC接了一個手搖輪,可以手動控制這3個軸,手搖輪的第一個旋鈕可以選擇控制不同的軸,第二個懸念可以選擇速度的倍率,然后通過轉盤控制電機正反運轉。
二、硬件設備:1.三菱PLC :FX3U-16MT-ES-A
2.42步進電機套裝:3臺
3.數控機床電子手輪
三、軟件:所需軟件版本:GX Works2(1.576A版本)
四、I/O分配:|
輸入點 |
注釋 |
輸出點 |
注釋 |
|
X0 |
手輪A相 |
Y0 |
X軸電機脈沖 |
|
X1 |
手輪B相 |
Y1 |
Y軸電機脈沖 |
|
X2 |
X軸檔位 |
Y2 |
Z軸電機脈沖 |
|
X3 |
Y軸檔位 |
Y3 |
X軸電機方向 |
|
X4 |
Z軸檔位 |
Y4 |
Y軸電機方向 |
|
X5 |
1倍檔 |
Y5 |
Z軸電機方向 |
|
X6 |
10倍檔 |
Y6 |
|
|
X7 |
100倍檔 |
Y7 |
五、程序編寫及思路:
(1)根據3U高速計數器的表格,可以找到X0和X1對應的高速計數器對應的高速計數器是C251。
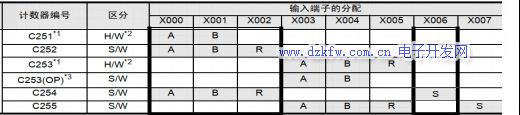
我們只需要把手輪上轉盤的兩個信號點,接入X0和X1就可以,用以下的程序就能紀錄手輪發出的脈沖信號個數

(2)通過M8012的上升沿信號用DMOV指令把脈沖數讀取到D0里面,每隔100ms讀取1次,1倍檔時我們乘以10倍放到D2寄存器里面,就是相當于算出了1秒里面能夠發送的脈沖數,1s發送的脈沖數就是的頻率,后面控制的程序就用這個D2的數據去控制,10倍檔就控制乘以100,100倍檔就乘以1000,最后面清空下這個高速計數器。這樣每隔100ms就刷新一般數據(這里我的手輪一圈的脈沖數和步進電機轉一圈需要的脈沖數是一致的,假如不同,那你需要根他們的比值去做一個乘法或者除法的運算),另外,3U的plc沒有手輪控制的功能,我們程序沒辦法做到絕對的同步,動作存在誤差。
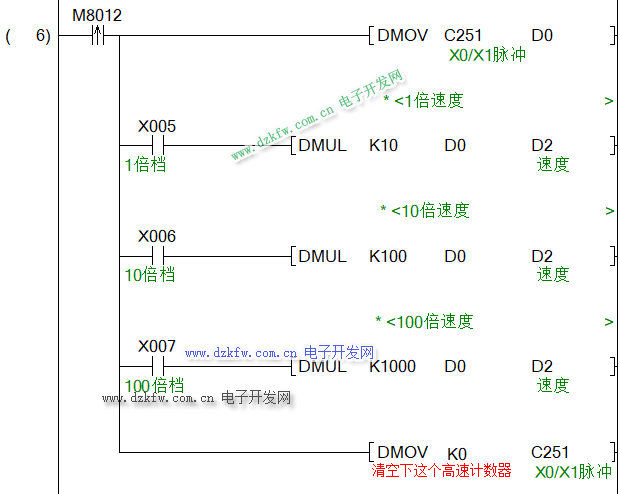
(3)由于硬件的限制,頻率一超過10000HZ時步進電機就控制不了(不同的電機硬件這個頻率可能不一樣,不一定是10000),所以這個參數需要根據你實際的數據去測試這個數據多大是極限,防止我們手輪搖的過快),所以下面做了限制

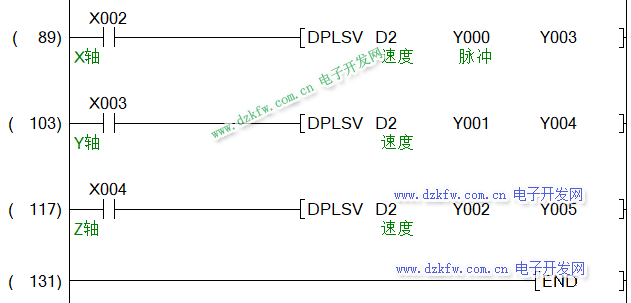
(4)最后面,使用可變速脈沖輸出指令控制,不同的軸的X點對應不同的Y點進行輸出,頻率采用前面計算出來的D2進行控制。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底