
應變式電阻傳感器是借助于彈性元件,將力的變化轉化為變形,然后利用導體的應變效應,將力轉化變成電阻的變化,最終利用測量電路得到被測量(力)的電信號。應變式電阻傳感器主要包括彈性元件,電阻應變片及測量電路。
電阻應變片的結構及工作原理說明:
(1)結構
電阻應變式片的結構圖
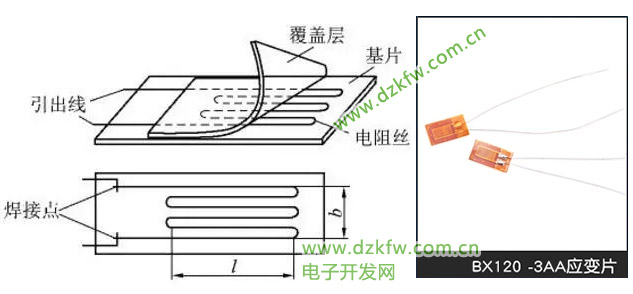
合金電阻絲以曲折性(柵形)粘接劑粘貼在絕緣基片上,兩端通過引線出,絲柵上面再粘貼一層絕緣保護膜。把應變片貼于被測變形物體上,敏感柵隨被測物體表面的變形而使電阻值改變,只要測出電阻的變化就可得知變形量的大小。電阻應變片主要恩威金屬應變片和半導體應變片,常見的金屬應變片有絲式,箔式和薄膜式三種(如圖),半導體應變片是在硅上利用擴散技術形成電阻。
1.電阻絲;2.金屬箔;3.半導體;4.基片
2.應變效應
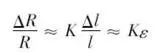
導體貨半導體收外力作用變形時,其電阻值也將隨之變化,這種現象被稱為:應變效應。設有一金屬導體,長度為I,界面劑為S,電阻率為P,則該導體的電阻R為:
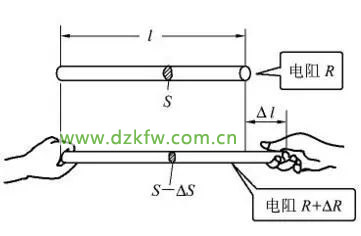
如上圖所示,當金屬導體收到拉力作用時,長度Δ1,截面積將縮小ΔS,從而導致電阻增加ΔR,這樣,導體的電阻變為R+ΔR。通過推導,可以得出導體電阻的相對變化量為:
上圖式中可以得出,Σ=ΔI/I成為縱向應變式;K為金屬導體的應變靈敏度。下圖為金屬絲的應變效應
金屬應變片的靈敏度主要與導體的幾何尺寸有關。近似等于2,如果沒有特別說明。一般K=2。但道題應變片的靈敏度主要與半導體材料有關,并且遠遠大于金屬應變片的靈敏度。
(2)測量電路
為了檢測應變片電阻的微小變化,需通過測量電路把電阻的變化轉化為電壓和電流后由儀表讀出。在應變式傳感器中最常用的轉換電路是橋式電路。按輸入電源性質的不同,橋式電路可分為交流電橋和直流電橋兩類。在大多數情況下,采用的是直流電橋電路。下面以直流電橋為例子分析它的工作原理和特性。
直流電橋的基本電路示意圖
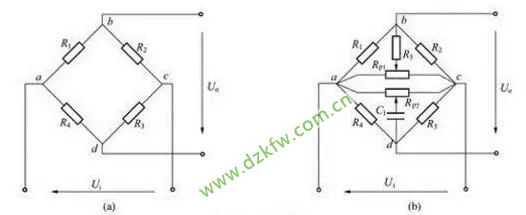
在未施加作用力時,應變為o,此時橋路輸出電壓Uo也為0,即橋路平衡,由橋路平衡的條件可知,應使4個橋臂的初始電阻R1,R2,R3和R4滿足R1R3=R2R4,或是R1/R2=R4/R3,通常取R1=R2=R3=R4即全等臂形式。
橋路工作時輸入電壓Ui保持恒定不變,當4個橋臂電阻的變化值Δ遠小于初始電阻。且電橋負載電阻為無窮大時,電橋的輸出電壓Uo可以近似用下式表示:

由于R1=R2=R3=R4,所以根據以上的根式可以變為:

根據圖上可知,ΔR/R=KΣx,其中KI為電阻應變片的靈敏度;ΣX為軸向應變。則式中可以寫成:
![]()
根據應用要求的不同,可接入不同數目的都電阻應變片,一般分為下面幾種形式的電橋:
1.雙臂半橋形式
2.單臂半橋形式
3.全橋形式
以上三種電橋形式中,全橋形式的靈敏度最高,也是最常用的一種形式。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底