
機械臂的工作原理涉及多個方面,包括機械結(jié)構(gòu)設(shè)計、控制理論、以及驅(qū)動系統(tǒng)等。具體如下:
- 機械結(jié)構(gòu)設(shè)計。機械臂通常由多個關(guān)節(jié)和連桿組成,形成一個類似于人臂的結(jié)構(gòu),各個部分通過電機、減速器等驅(qū)動系統(tǒng)協(xié)同工作,實現(xiàn)機械臂的自由度運動。
- 控制理論。機械臂的控制理論是其運動的基礎(chǔ),包括運動學和動力學模型。通過控制每個關(guān)節(jié)的運動,機械臂能夠完成復(fù)雜的任務(wù),運動方式包括基于關(guān)節(jié)的運動和基于笛卡爾坐標系的運動。
- 驅(qū)動系統(tǒng)。液壓機械臂使用液壓原理來驅(qū)動,通過液壓發(fā)動機、液壓缸、液壓管和液壓閥的控制,實現(xiàn)每個關(guān)節(jié)的運動。
氣壓機械臂原理

氣壓機械臂的工作原理主要基于空氣壓縮技術(shù),具體內(nèi)容如下:
- 氣源系統(tǒng)。氣壓機械臂的核心組成部分之一,包括大氣壓力源、過濾器、油霧器和壓力調(diào)節(jié)器,負責提供壓縮空氣,以供機械臂運作。
- 執(zhí)行機構(gòu)。主要由氣缸和氣動推進器構(gòu)成,利用壓縮空氣實現(xiàn)機械臂的水平移動、垂直吸取、旋轉(zhuǎn)等動作。
- 控制系統(tǒng)。分為氣路控制和電路控制兩部分,通過氣控閥控制氣源的開啟和關(guān)閉,實現(xiàn)機械臂的動作,電路控制則主要通過控制器完成,包括程序控制和手動控制兩種模式。
液壓機械臂原理
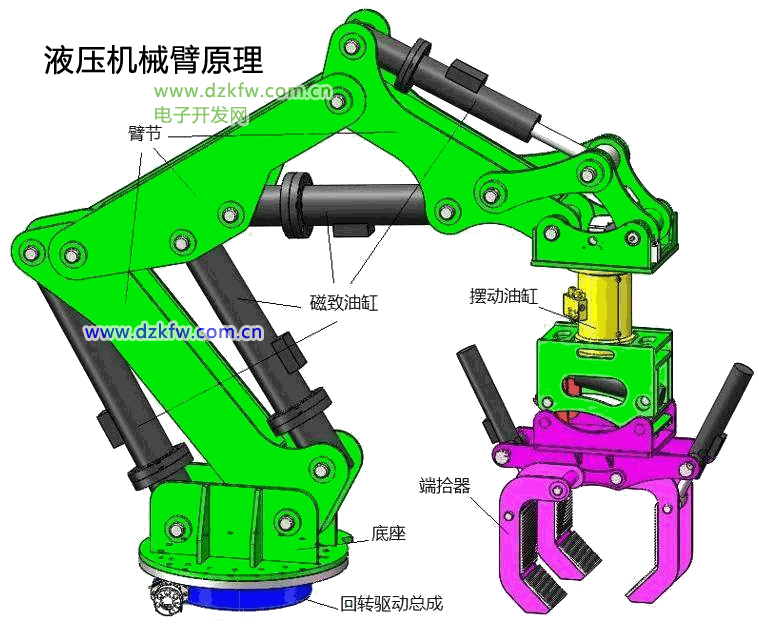
液壓機械臂是一種能夠提供高精度、高速度和高靈活性運動控制的設(shè)備,其工作原理主要基于液壓傳動系統(tǒng)。以下是液壓機械臂的工作原理:
- 液壓泵將液壓油壓入系統(tǒng),并通過管道輸送到液壓缸。
- 在液壓缸內(nèi),液壓油的壓力作用于活塞,從而推動活塞運動。
- 通過控制液壓閥的開閉,可以控制液壓油的流量和壓力,進而控制液壓缸的推力和機械臂的運動。
- 機械臂的運動可以包括旋轉(zhuǎn)、伸縮等,以實現(xiàn)抓取、提起、挪動等動作。
此外,液壓機械臂的設(shè)計還需要考慮動力學模型,包括慣性力、阻力和驅(qū)動力三個部分,以確保機械臂動作的精確控制。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底