
物體在空間具有六個自由度,即沿x、y、z三個直角坐標軸方向的移動自由度和繞這三個坐標軸的轉(zhuǎn)動自由度 。因此,要完全確定物體的位置,就必須清楚這六個自由度。
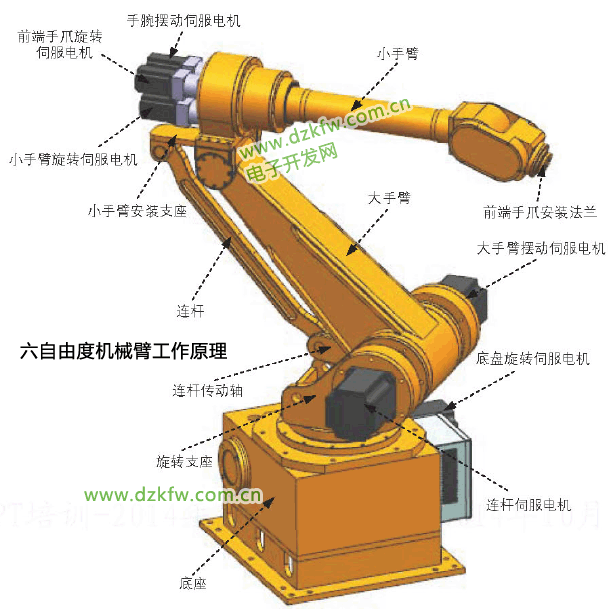
六自由度機械臂原理
任何一個沒有受約束的物體,在空間均具有6個獨立的運動。
以如圖所示的長方形為例,它在直角坐標系oxyz中可以有3個平移運動和3個轉(zhuǎn)動。3個平移運動分別是沿x,y,z軸的平移運動,3個轉(zhuǎn)動分別是繞x,y,z軸的轉(zhuǎn)動。習慣上把上述6個獨立運動稱做6個自由度。
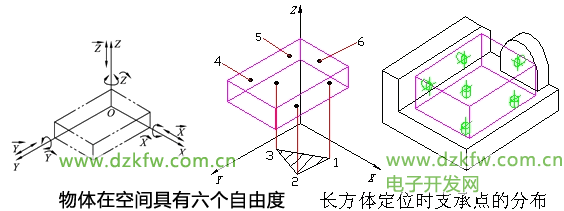
如果采取一定的約束措施,消除物體的6個自由度,則物體被完全定位。如上圖所示,采用6個按一定規(guī)則設(shè)置的支撐點,約束物體6個自由度的原理稱為六點定位原理。
六自由度機械臂是一種多功能的機械設(shè)備,它能夠在一個平面上進行六個方向的獨立運動。具體來說,六自由度機械臂可以在以下幾個方向上運動:
- 上下運動(沿著Z軸):機械臂可以從地面垂直提起,也可以將其放下至地面。
- 前后運動(沿著Y軸):機械臂可以在水平面內(nèi)前后移動。
- 左右運動(沿著X軸):機械臂可以在水平面內(nèi)左右移動。
- 繞X軸旋轉(zhuǎn):機械臂可以在自身縱軸上進行旋轉(zhuǎn)。
- 繞Y軸旋轉(zhuǎn):機械臂可以在自身橫軸上進行旋轉(zhuǎn)。
- 繞Z軸旋轉(zhuǎn):機械臂可以在自身豎直軸上進行旋轉(zhuǎn)。
為了實現(xiàn)這些運動,六自由度機械臂通常包括多個獨立的關(guān)節(jié),每個關(guān)節(jié)都由電機和傳動裝置控制,能夠精確地控制速度和力量。此外,機械臂的控制方式主要有開環(huán)控制和閉環(huán)控制兩種。開環(huán)控制是通過預(yù)設(shè)的軌跡和速度來進行控制的,而閉環(huán)控制則是通過傳感器獲取機械臂運動的狀態(tài)反饋,然后通過控制器進行計算和調(diào)整,以達到精確控制的目的。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底